
Федеральное агентство по образованию Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«Южно-Уральский государственный университет»
Факультет Аэрокосмический
Кафедра Летательные аппараты и управление
Реферат
по истории аэрокосмической техники
Описание систем управления беспилотными летательными аппаратами
Челябинск 2009
Введение
Сам по себе БЛА - лишь часть сложного многофункционального комплекса. Как правило, основная задача, возлагаемая на комплексы БЛА, – проведение разведки труднодоступных районов, в которых получение информации обычными средствами, включая авиаразведку, затруднено или же подвергает опасности здоровье и даже жизнь людей. Помимо военного использования применение комплексов БЛА открывает возможность оперативного и недорогого способа обследования труднодоступных участков местности, периодического наблюдения заданных районов, цифрового фотографирования для использования в геодезических работах и в случаях чрезвычайных ситуаций. Полученная бортовыми средствами мониторинга информация должна в режиме реального времени передаваться на пункт управления для обработки и принятия адекватных решений. В настоящее время наибольшее распространение получили тактические комплексы микро и мини-БЛА. В связи с большей взлетной массой мини-БЛА их полезная нагрузка по своему функциональному составу наиболее полно представляет состав бортового оборудования, отвечающего современным требованиям к многофункциональному разведывательному БЛА. Поэтому далее рассмотрим состав полезной нагрузки мини-БЛА.
История
В 1898 г. Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно. В 1910 г., вдохновлённый успехами братьев Райт, молодой американский военный инженер из Огайо Чарльз Кеттеринг предложил использовать летательные аппараты без человека. По его замыслу управляемое часовым механизмом устройство в заданном месте должно было сбрасывать крылья и падать как бомба на врага. Получив финансирование армии США, он построил, и с переменным успехом испытал несколько устройств, получивших названия The Kattering Aerial Torpedo, Kettering Bug (или просто Bug), но в боевых действиях они так и не применялись. В 1933 г. в Великобритании разработан первый БПЛА многократного использования Queen Bee. Были использованы три отреставрированных биплана Fairy Queen, дистанционно управляемые с судна по радио. Два из них потерпели аварию, а третий совершил успешный полёт, сделав Великобританию первой страной, извлёкшей пользу из БПЛА. Эта радиоуправляемая беспилотная мишень под названием DH82A Tiger Moth использовалась на королевском Военно-морском флоте с 1934 по 1943 г. Армия и ВМФ США с 1940 года использовали ДПЛА Radioplane OQ-2 в качестве самолёта-мишени. На несколько десятков лет опередили своё время исследования немецких учёных, давших миру на протяжении 40-х годов реактивный двигатель и крылатую ракету. Практически до конца восьмидесятых, каждая удачная конструкция БПЛА «от крылатой ракеты» представляла собой разработку на базе «Фау-1», а «от самолёта» — «Фокке-Вульф» Fw 189. Ракета Фау-1 была первым применявшимся в реальных боевых действиях беспилотным летательным аппаратом. В течение второй мировой войны немецкие учёные вели разработки нескольких радиоуправляемых типов оружия, включая управляемые бомбы Henschel Hs 293 и Fritz X, ракету Enzian и радиоуправляемый самолёт, заполненный взрывчатым веществом. Несмотря на незавершённость проектов, Fritz X и Hs 293 использовались на Средиземном море против бронированных военных кораблей. Менее сложным и созданным скорее с политическими, чем с военными целями самолёт V1 Buzz Bomb с реактивным пульсирующим двигателем, который мог запускаться как с земли, так и с воздуха. В СССР в 1930—1940 гг. авиаконструктором Никитиным разрабатывался торпедоносец-планер специального назначения (ПСН-1 и ПСН-2) типа «летающее крыло» в двух вариантах: пилотируемый тренировочно-пристрелочный и беспилотный с полной автоматикой. К началу 1940 г. был представлен проект беспилотной летающей торпеды с дальностью полёта от 100 км и выше (при скорости полёта 700 км/ч). Однако этим разработкам не было суждено воплотится в реальные конструкции. В 1941 году были удачные применения тяжёлых бомбардировщиков ТБ-3 в качестве БПЛА для уничтожения мостов. Во время второй мировой войны ВМС США для нанесения ударов по базам германских подводных лодок пытались использовать дистанционно пилотируемые системы палубного базирования на базе самолёта B-17. После второй мировой войны в США продолжились разработки некоторых видов БПЛА. Во время войны в Корее для уничтожения мостов успешно применялась радиоуправляемая бомба Tarzon. 23 сентября 1957 г. КБ Туполева получил госзаказ на разработку мобильной ядерной сверхзвуковой крылатой ракеты среднего радиуса действия. Первый взлёт модели Ту-121 был осуществлён 25 августа 1960 г., но программа была закрыта в пользу Баллистических ракет КБ Королёва. Созданная же конструкция нашла применение в качестве мишени, а также при создании беспилотных самолётов разведчиков Ту-123 «Ястреб», Ту-143 «Рейс» и Ту-141 «Стриж», стоявших на вооружении ВВС СССР с 1964 по 1979 г. Ту-143 «Рейс» на протяжении 70-х годов поставлялся в африканские и ближневосточные страны, в том числе и в Ирак. Ту-141 «Стриж» состоит на вооружении ВВС Украины и поныне. Комплексы «Рейс» с БРЛА Ту-143 эксплуатируются до настоящего времени, поставлялись в Чехословакию (1984 г.), Румынию, Ирак и Сирию (1982 г.), использовались в боевых действиях во время Ливанской войны. В Чехословакии в 1984 г. были сформированы две эскадрильи, одна из которых в настоящее время находиться в Чехии, другая - в Словакии. В начале 1960-х годов дистанционно-пилотируемые летательные аппараты использовались США для слежения за ракетными разработками в Советском Союзе и на Кубе. После того, как были сбиты RB-47 и два U-2, для выполнения разведывательных работ была начата разработка высотного беспилотного разведчика Red Wadon (модель 136). БПЛА имел высоко расположенные крылья и малую радиолокационную и инфракрасную заметность. Во время войны во Вьетнаме с ростом потерь американской авиации от ракет вьетнамских ЗРК возросло использование БПЛА. В основном они использовались для ведения фоторазведки, иногда для целей РЭБ. В частности, для ведения радиотехнической разведки применялись БПЛА 147E. Несмотря на то что, в конечном счёте, он был сбит, беспилотник передавал на наземный пункт характеристики вьетнамского ЗРК C75 в течение всего своего полёта. Ценность этой информации была соизмерима с полной стоимостью программы разработки беспилотного летательного аппарата. Она также позволила сохранить жизнь многим американским лётчикам, а также самолёты в течение последующих 15 лет, вплоть до 1973 г. В ходе войны американские БПЛА совершили почти 3500 полётов, причём потери составили около четырёх процентов. Аппараты применялись для ведения фоторазведки, ретрансляции сигнала, разведки радиоэлектронных средств, РЭБ и в качестве ложных целей для усложнения воздушной обстановки. Но полная программа БПЛА была окутана тайной настолько, что её успех, который должен был стимулировать развитие БПЛА после конца военных действий, в значительной степени остался незамеченным. Беспилотные летательные аппараты применялись Израилем во время арабо-израильского конфликта в 1973 г. Они использовались для наблюдений и разведки, а также в качестве ложных целей. В 1982 г. БПЛА использовались во время боевых действий в долине Бекаа в Ливане. Израильский БПЛА AI Scout и малоразмерные дистанционно-пилотируемые летательные аппараты Mastiff провели разведку и наблюдение сирийских аэродромов, позиций ЗРК и передвижений войск. По информации, получаемой с помощью БПЛА, отвлекающая группа израильской авиации перед ударом главных сил вызвала включение радиолокационных станций сирийских ЗРК, по которым был нанесён удар с помощью самонаводящихся противорадиолокационных ракет, а те средства, которые не были уничтожены, были подавлены помехами. Успех израильской авиации был впечатляющим — Сирия потеряла 18 батарей ЗРК. СССР ещё в 70-е—80-е годы был лидером по производству БПЛА, только Ту-143 было выпущено около 950 штук. Дистанционно-пилотируемые летательные аппараты и автономные БПЛА использовались обеими сторонами в течение войны в Персидском заливе 1991 г., прежде всего как платформы наблюдения и разведки. США, Англия, и Франция развернули и эффективно использовали системы типа Pioneer, Pointer, Exdrone, Midge, Alpilles Mart, CL-89. Ирак использовал Al Yamamah, Makareb-1000, Sahreb-1 и Sahreb-2. Во время операции «Буря в пустыне» БПЛА тактической разведки коалиции совершили более 530 вылетов, налёт составил около 1700 часов. При этом 28 аппаратов были повреждены, включая 12, которые были сбиты. Из 40 БПЛА Pioneer, используемых США, 60 процентов были повреждены, но 75 процентов оказались ремонтопригодными. Из всех потерянных БПЛА только 2 относились к боевым потерям. Низкий коэффициент потерь обусловлен вероятнее всего небольшими размерами БПЛА, в силу чего иракская армия сочла что они не представляют большой угрозы. БПЛА также использовались и в операциях по поддержанию мира силами ООН в бывшей Югославии. В 1992 г. Организация Объединённых Наций санкционировала использование военно-воздушных сил НАТО, чтобы обеспечить прикрытие Боснии с воздуха, поддерживать наземные войска, размещённые по всей стране. Для выполнения этой задачи требовалось ведение круглосуточной разведки.
В августе 2008 года ВВС США завершили перевооружение беспилотными летательными аппаратами MQ-9 Reaper первой боевой авиачасти — 174-го истребительного авиакрыла Национальной гвардии. Перевооружение происходило в течение трёх лет. Ударные БПЛА показали высокую эффективность в Афганистане и Ираке. Основные преимущества перед заменёнными F-16: меньшая стоимость закупки и эксплуатации, большая продолжительность полёта, безопасность операторов.
Состав бортового оборудования современных БЛА
Для обеспечения задач наблюдения подстилающей поверхности в реальном масштабе времени в процессе полета и цифрового фотографирования выбранных участков местности, включая труднодоступные участки, а также определения координат исследуемых участков местности полезная нагрузка БЛА[3,4,5]должна содержать в своем составе:
• Устройства получения видовой информации:
•Спутниковую навигационную систему (ГЛОНАСС/GPS);
• Устройства радиолинии видовой и телеметрической информации;
• Устройства командно-навигационной радиолинии с антенно-фидерным устройством;
•Устройство обмена командной информацией;
• Устройство информационного обмена;
• Бортовая цифровая вычислительная машина (БЦВМ);
•Устройство хранения видовой информации.
Современные телевизионные (ТВ) камеры обеспечивают представление оператору в реальном времени картины наблюдаемой местности в формате наиболее близком к характеристикам зрительного аппарата человека, что позволяет ему свободно ориентироваться на местности и при необходимости выполнять пилотирование БЛА. Возможности по обнаружению, и распознаванию объектов определяются характеристиками фотоприемника и оптической системы телевизионные камеры. Основным недостатком современных телевизионных камер является их ограниченная чувствительность, не обеспечивающая всесуточности применения. Применение тепловизионных (ТПВ) камер позволяет обеспечить всесуточность применения БЛА. Наиболее перспективным представляется применение комбинированных теле-тепловизионных систем. При этом оператору представляется синтезированное изображение, содержащее наиболее информативные части, присущие видимому и инфракрасному диапазонам длин волн, что позволяет существенно повысить тактико-технические характеристики системы наблюдения. Однако подобные системы сложны технически и достаточно дороги. Применение РЛС позволяет получать информацию круглосуточно и при неблагоприятных метеоусловиях, когда ТВ и ТПВ каналы не обеспечивают получение информации. Применение сменных модулей, позволяет снизить стоимость и реконфигурировать состав бортового оборудования для решения поставленной задачи в конкретных условиях применения. Рассмотрим состав бортового оборудования мини-БЛА.
▪ Обзорное курсовое устройство закрепляется неподвижно под некоторым углом к строевой оси летательного аппарата, обеспечивающим необходимую зону захвата на местности. В состав обзорного курсового устройства может входить телевизионная камера (ТК) с широкопольным объективом (ШПЗ). В зависимости от решаемых задач может быть оперативно заменена или дополнена тепловизионной камерой (ТПВ), цифровым фотоаппаратом (ЦФА) или РЛС.
▪ Устройство детального обзора с поворотным устройством состоит из ТК детального обзора с узкопольным объективом (УПЗ) и трехкоординатного поворотного устройства, обеспечивающего разворот камеры по курсу, крену и тангажу по командам оператора для детального анализа конкретного участка местности. Для обеспечения работы в условиях пониженной освещенности ТК может быть дополнена тепловизионной камерой (ТПВ) на микроболометрической матрице с узкопольным объективом. Возможна также замена ТК на ЦФА. Подобное решение позволит использовать БЛА для проведения аэрофотосъемки при развороте оптической оси ЦФА в надир.
▪ Устройства радиолинии видовой и телеметрической информации (передатчик и антенно-фидерное устройство) должны обеспечивать передачу видовой и телеметрической информации в реальном или близком к реальному масштабе времени на ПУ в пределах радиовидимости.
▪ Устройства командно-навигационной радиолинии (приемник и антенно-фидерное устройство) должны обеспечивать прием в пределах радиовидимости команд пилотирования БЛА и управления его оборудованием.
▪ Устройство обмена командной информацией обеспечивает распределение командно и навигационной информации по потребителям на борту БЛА.
▪ Устройство информационного обмена обеспечивает распределение видовой информации между бортовыми источниками видовой информации, передатчиком радиолинии видовой информации и бортовым устройством хранения видовой информации. Это устройство также обеспечивает информационный обмен между всеми функциональными устройствами, входящими в состав целевой нагрузки БЛА по выбранному интерфейсу (например, RS-232). Через внешний порт этого устройства перед взлетом БЛА проводится ввод полетного задания и осуществляется предстартовый автоматизированный встроенный контроль на функционирования основных узлов и систем БЛА.
▪ Спутниковая навигационная система обеспечивает привязку координат (топопривязку) БЛА и наблюдаемых объектов по сигналам глобальной спутниковой навигационной системы ГЛОНАСС (GPS). Спутниковая навигационная система состоит из одного или двух приемников (ГЛОНАСС/GPS) с антенными системами. Применение двух приемников, антенны которых разнесены по строительной оси БЛА, позволяет определять помимо координат БЛА значение его курсового угла.
▪ Бортовая цифровая вычислительная машина (БЦВМ) обеспечивает управление бортовым комплексом БЛА.
▪ Устройство хранения видовой информации обеспечивает накопление выбранной оператором (или в соответствии с полетным заданием) видовой информации до момента посадки БЛА. Это устройство может быть съемным или стационарным. В последнем случае должен быть предусмотрен канал съема накопленной информации во внешние устройства после посадки БЛА. Информация, считанная с устройства хранения видовой информации, позволяет проводить более детальный анализ при дешифрировании полученной в полете БЛА видовой информации.
▪ Встроенный блок питания обеспечивает согласование по напряжению и токам потребления бортового источника питания и устройств, входящих в состав полезной нагрузки, а также оперативную защиту от коротких замыканий и перегрузок в электросети. В зависимости от класса БЛА полезная нагрузка может дополняться различными видами РЛС, датчиками экологического, радиационного и химического мониторинга. Комплекс управления БЛА представляет собой сложную, многоуровневую структуру, основная задача которой – обеспечить вывод БЛА в заданный район и выполнение операций в соответствии с полетным заданием, а также обеспечить доставку информации, полученной бортовыми средствами БЛА, на пункт управления.
Бортовой комплекс навигации и управления БЛА
Бортовой комплекс "Аист" является полнофункциональным средством навигации и управления беспилотного летательного аппарата (БЛА) самолетной схемы. Комплекс обеспечивает: определение навигационных параметров, углов ориентации и параметров движения БЛА (угловых скоростей и ускорений); навигацию и управление БЛА при полете по заданной траектории; стабилизацию углов ориентации БЛА в полете; выдачу в канал передачи телеметрической информации о навигационных параметрах, углах ориентации БЛА. Центральным элементом БК "Аист" является малогабаритная инерциальная навигационная система (ИНС), интегрированная с приемником спутниковой системы навигации. Построенная на базе микроэлектромеханических датчиков (МЕМS гироскопов и акселерометров) по принципу бесплатформенной ИНС, система является уникальным высокотехнологичным изделием, гарантирует высокую точность навигации, стабилизации и управления ЛА любого класса. Встроенный датчик статического давления обеспечивает динамичное определение высоты и вертикальной скорости. Состав бортового комплекса: блок инерциальной навигационной системы; приемник СНС; блок автопилота; накопитель Летных Данных; датчик воздушной скорости В базовой конфигурации управление осуществляется по каналам: элероны; руль высоты; руль направления; контроллер двигателя. Комплекс совместим с радиоканалом РСМ (импульсно-кодовая модуляция) и позволяет управлять БЛА как в ручном режиме со стандартного пульта дистанционного управления, так и в автоматическом, по командам автопилота. Управляющие команды автопилота генерируются в форме стандартных широтно-импульсно-модулированных (ШИМ) сигналов, подходящих к большинству типов исполнительных механизмов. Физические характеристики:
размеры, мм: блок автопилота - 80 х 47 х 10; ИНС – 98 х 70 х 21; приемник СНС - 30 х 30 х 10; вес, кг: блок автопилота - 0,120; ИНС - 0,160; приемник СНС - 0,03. Электрические характеристики: напряжение питания, В - 10...27; потребляемая мощность (макс.), Вт - 5. Окружающая среда: температура, град С - от –40 до +70; вибрация/удар, g - 20.
Управление: порты RS-232 (2) - прием/передача данных; порты RS-422 (5) – связь с внешними устройствами; каналы ШИМ (12) - управляющие устройства; программируемые ППМ (255) - поворотные пункты маршрута. Рабочие диапазоны: крен - ±180°; тангаж - ±90°; курс (путевой угол) - 0...360; ускорение - ±10 g; угловая скорость - ±150°/сек
Система управления пространственным положением остронаправленных антенных систем в комплексах БЛА
Сам по себе беспилотный летательный аппарат (БЛА) – лишь часть сложного комплекса, одна из основных задач которого – оперативное доведение полученных сведений до оперативного персонала пункта управления (ПУ). Возможность обеспечения устойчивой связи является одной из важнейших характеристик, определяющих эксплуатационные возможности комплекса управления БЛА и обеспечивает доведение сведений, полученных БЛА, в режиме «реального времени» до оперативного персонала ПУ. Для обеспечения связи на значительные расстояния и повышения помехозащищенности за счет пространственной селекции в комплексах управления БЛА широко используются остронаправленные антенные системы (АС) как на ПУ, так и на БЛА. Функциональная схема системы управления пространственным положением остронаправленной АС, обеспечивающая оптимизацию процесса вхождения в связь в комплексах управления БЛА, приведена на рис. 1.
Система управления остронаправленной АС (см. рис. 1) включает в себя:
• Собственно остронаправленную АС, радиотехнические параметры которой выбираются, исходя из требований обеспечения необходимой дальности связи по радиолинии.
• Сервопривод АС, обеспечивающий пространственную ориентацию ДН АС в направлении ожидаемого появления излучения объекта связи.
• Систему автоматического сопровождения по направлению (АСН), обеспечивающую устойчивое автосопровождение объекта связи в зоне уверенного захвата пеленгационной характеристики системы АСН.
• Радиоприемного устройства, обеспечивающего формирование сигнала «Связь», свидетельствующего о приеме информации с заданным качеством.
• Процессор управления антенной системой, обеспечивающий анализ текущего состояния системы управления АС, формирование сигналов управления сервоприводом для обеспечения пространственной ориентации АС в соответствии с полетным заданием и алгоритмом пространственного сканирования, анализ наличия связи, анализ возможности перевода сервопривода АС из режима «Внешнее управление» в режим «Автосопровождение», формирование сигнала перевода сервопривода АС в режим «Внешнее управление».

Рис. 1. Функциональная схема системы управления пространственным положением остронаправленной АС в комплексах управления БЛА
Основная задача, выполняемая системой управления пространственным положением остронаправленной АС, – обеспечить устойчивое вхождение в связь с объектом, заданным полетным заданием.
Эта задача распадается на ряд подзадач:
• Обеспечение пространственной ориентации ДН АС в направлении ожидаемого появления излучения объекта связи и ее пространственной стабилизации для случая расположения АС на борту летательного аппарата.
• Расширение зоны устойчивого захвата излучения объекта связи за счет применения дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой.
• Переход в режим устойчивого автосопровождения объекта связи системой АСН при обнаружении объекта связи.
• Обеспечение возможности повторного вхождения в связь в случае ее срыва. Для дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой можно выделить следующие особенности:
• Сканирование ДН АС осуществляется дискретно во времени и в пространстве. • Пространственные перемещения ДН АС при сканировании осуществляются таким образом, чтобы не оставалось пространственных зон, которые не перекрываются зоной уверенного захвата система АСН за весь цикл сканирования (см. рис.2).
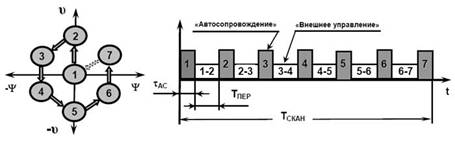
Рис.2. Пример организации дискретного пространственного сканирования в азимутальной и угломестной плоскостях
Для каждого конкретного пространственного положения, определяемого алгоритмом сканирования, можно выделить две фазы: «Автосопровождение» и «Внешнее управление».
• В фазе «Автосопровождение» система АСН осуществляет оценку возможности приема излучения объекта связи для выбранного пространственного положения РСН.
В случае положительного результата оценки: Пространственное сканирование прекращается. Система АСН продолжает осуществлять автосопровождение излучения объекта связи по своему внутреннему алгоритму. На вход сервопривода АС поступают сигналы пространственной ориентации АС по данным текущего пеленга объекта связи от системы АСН XАСН(t). В случае отрицательного результата оценки: Осуществляется пространственное перемещение РСН АС в следующее пространственное положение, определяемое алгоритмом сканирования.
• В фазе «Внешнее управление» на выходе процессора управления антенной системой формируются сигналы управления сервоприводом АС. Компоненты сигнала управления сервоприводом обеспечивают:
X0 – первоначальную пространственную ориентацию ДН АС в направлении на объект связи; ∆XЛА(t)–парирование пространственных эволюций летательного аппарата; XАЛГ(t) – расширение зоны устойчивого захвата излучения объекта связи системы АСН в соответствии с дискретным алгоритмом пространственного сканирования с детерминированной пространственно-временной структурой.
В случае срыва связи, начиная с момента времени ТСВ=0 (пропадание сигнала «СВЯЗЬ»), сигнал XАСН(ТСВ=0) запоминается в устройстве «Вычисления и хранения», и используется в дальнейшем процессором управления АС в качестве значения ожидаемого пеленга объекта связи. Процесс вхождения в связь повторяется как описано выше. В режиме «Внешнее управление» сигнал управления сервоприводом остронаправленной АС по каналам «курс», «тангаж» и «крен» может быть записан
 (1)
(1)
В режиме «Автосопровождение» сигнал управления сервоприводом остронаправленной АС может быть записан
 (2)
(2)
Конкретный вид сигналов управления определяется конструктивными особенностями сервопривода антенной системы.
Инерциальная система БЛА
Ключевым моментом в упомянутой цепочке является «измерение состояния системы».То есть координат местоположения, скорости, высоты, вертикальной скорости, углов ориентации, а также угловых скоростей и ускорений. В бортовом комплексе навигации и управления, разработанном и производимым ООО «ТеКнол», функцию измерения состояния системы выполняет малогабаритная инерциальная интегрированная система (МИНС). Имея в своем составе триады инерциальных датчиков микромеханических гироскопов и акселерометоров), а также барометрический высотомер и трехосный магнитометр, и комплексируя данные этих датчиков с данными приемника GPS, система вырабатывает полное навигационное решение по координатам и углам ориентации. МИНС разработки ТеКнола – это полная Инерциальная система, в которой реализован алгоритм бесплатформенной ИНС, интегрированной с приемником системы спутниковой навигации. Именно в этой системе содержится «секрет» работы всего комплекса управления БЛА. По сути, одновременно работают три навигационных системы в одном вычислителе по одним и тем же данным. Мы их называем «платформами». Каждая из платформ реализует свои принципы управления, имея свои «правильные» частоты (низкие или высокие). Мастер-фильтр выбирает оптимальное решение с любой из трех платформ в зависимости от характера движения. Этим обеспечивается устойчивость системы не только в прямолинейном движении, но и при виражах, некоординированных разворотах, боковом порывистом ветре. Система никогда не теряет горизонт, чем обеспечиваются правильные реакции автопилота на внешние возмущения и адекватное распределение воздействий между органами управления БЛА.
Бортовой комплекс управления БЛА
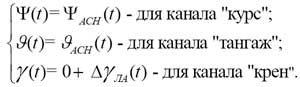
В состав Бортового Комплекса Навигации и Управления БЛА входят три составных элемента (Рисунок 1).
1. Интегрированная Навигационная Система;
2. Приемник Спутниковой Навигационной системы
3. Модуль автопилота.__
Модуль автопилота осуществляет выработку управляющих команд в виде ШИМ (широтно-импульсно-модулированных) сигналов, сообразно законам управления, заложенным в его вычислитель. Помимо управления БЛА, автопилот программируется на управление бортовой аппаратурой:
• стабилизация видеокамеры,
• синхронизированное по времени и координатам срабатывание затвора
фотоаппарата,
• выпуск парашюта,
• сброс груза или отбор проб в заданной точке
и другие функции. В память автопилота может быть занесено до 255 поворотных пунктов маршрута. Каждая точка характеризуется координатами, высотой прохождения и скоростью полета.
В полете автопилот также обеспечивает выдачу в канал передачи телеметрической информации для слежения за полетом БЛА (Рисунок 2).
А что же тогда представляет собой «квазиавтопилот»? Многие фирмы сейчас декларируют, что обеспечивают своим системам автоматический полет с помощью «самого маленького в мире автопилота».
Наиболее показательный пример такого решения — продукция канадской фирмы “Micropilot”. Для формирования сигналов управления здесь используют «сырые» данные – сигналы от гироскопов и акселерометров. Такое решение по определению не является робастным (устойчивым к внешним воздействиям и чувствительным к условиям полета) и в той или иной степени работоспособно только при полете в стабильной атмосфере.


Любое существенное внешнее возмущение (порыв ветра, восходящий поток или воздушная яма) чревато потерей ориентации летательного аппарата и аварией. Поэтому все, кто когда-либо сталкивался с подобной продукцией, рано или поздно понимали ограниченность таких автопилотов, которые никак не могут быть использованы в коммерческих серийных системах БЛА.
Более ответственные разработчики понимая, что необходимо настоящее навигационное решение, пытаются реализовать навигационный алгоритм с применением известных подходов Калмановской фильтрации.
К сожалению, и здесь не все так просто. Калмановская фильтрация — это всего лишь вспомогательный математический аппарат, а не решение задачи. Поэтому невозможно создать робастную устойчивую систему, просто перенося на MEMS интегрированные системы стандартный математический аппарат. Требуется тонкая и точная настройка на конкретное приложение. В данном случае – для маневренного объекта крылатой схемы. В нашей системе реализован более чем 15-ти летний опыт разработки инерциальных систем и алгоритмов комплексирования ИНС и GPS. К слову сказать, в мире только несколько стран обладают ноу-хау инерциальных систем. Это
Россия, США, Германия, Франция и Великобритания. За этим ноу-хау стоят научные, конструкторские и технологические школы, и по меньшей мере
наивно думать, что такую систему можно разработать и изготовить «на коленке» в институтской лаборатории или в ангаре аэродрома. Дилетантский подход здесь, как и во всех прочих случаях, чреват в конечном счете финансовыми потерями и потерей времени. Почему столь важен автоматический полет применительно к задачам, решаемым предприятиями топливно-энергетического комплекса? Понятно, что сам воздушный мониторинг не имеет альтернативы. Контроль за состоянием трубопроводов и других объектов, задачи охраны, мониторинга и видеонаблюдения лучше всего решаются с применением летательных аппаратов. А вот снижение издержек, обеспечение регулярности полетов, автоматизация сбора и обработки информации — здесь, совершенно справедливо уделяется внимание беспилотной технике, что и доказывает высокий интерес специалистов к проходящей выставке и форуму. Однако, как мы видели на выставке, беспилотные системы также могут представлять собой сложные и дорогие комплексы, требующие поддержки, обслуживания, создания наземной инфраструктуры и служб эксплуатации. В наибольшей степени это относится к комплексам, изначально созданным для решения военных задач, а теперь спешно адаптируемым к хозяйственным применениям. Отдельно остановимся на вопросах эксплуатации. Управление БЛА — задача для хорошо подготовленного профессионала. В армии США операторами БЛА становятся действующие пилоты ВВС после годовой подготовки и тренинга. Во многих аспектах это сложнее, чем пилотирование самолета, и, как известно, большинство аварий беспилотных ЛА вызваны ошибками пилота-оператора. Автоматические системы БЛА, оснащенные полноценной системой автоматического управления требуют минимальной подготовки наземного персонала, при этом решают задачи на большом удалении от места базирования, вне контакта с наземной станцией, в любых погодных условиях. Они просты в эксплуатации, мобильны, быстро развертываются и не требуют наземной инфраструктуры. Можно утверждать, что высокие характеристики систем БЛА, оснащенных полноценной САУ, снижают эксплуатационные издержки и требования к персоналу.

Системы автоматических БЛА
Каковы же практические результаты применения бортового комплекса с настоящей инерциальной системой? Компания «ТеКнол» разработала и предлагает заказчикам системы автоматических БЛА быстрого развертывания для решения задач мониторинга и воздушного наблюдения. Эти системы представлены на нашем стенде на выставке.
Автопилот в составе бортового комплекса навигации и управления обеспечивает
• Автоматический полет по заданному маршруту;
• Автоматический взлет и заход на посадку;
• Поддержание заданной высоты и скорости полета;
• Стабилизацию углов ориентации;
• Программное управление бортовыми системами.
Оперативный БЛА.
Система многоцелевого БЛА разрабатывается компанией «Транзас» и оснащается комплексом навигации и управления «ТеКнола».
Поскольку управление БЛА малого размера представляет наиболее трудную задачу, приведем примеры работы бортового комплекса навигации и управления для оперативного мини-БЛА взлетным весом 3,5 кг.
При проведении аэросъемки местности БЛА совершает полет по линиям с интервалом 50-70 метров. Автопилот обеспечивает следование по маршруту с отклонением, не превышающим 10-15 метров при скорости ветра 7 м/с (Рисунок 5).
Понятно, что самый опытный пилот-оператор не в состоянии обеспечить такую точность управления.

Рис. 5: Маршрут и траектория полета мини БЛА при съемке местности
Поддержание заданной высоты полета также обеспечивается МИНС, которая вырабатывает комплексное решение по данным GPS, барометрического высотомера и инерциальных датчиков. При автоматическом полете по маршруту бортовой комплекс обеспечивает точность поддержания высоты в пределах 5 метров (Рисунок 6), что позволяет уверенно летать на малых высотах и с огибанием рельефа.

Рис. 6
Рисунок 7 показывает, как САУ выводит БЛА из критического крена в 65º, в результате воздействия порыва бокового ветра при совершении маневра. Только настоящая ИНС в составе бортового комплекса управления в состоянии обеспечить динамичное измерение углов ориентации БЛА, не «потерять горизонт». Поэтому в процессе испытаний и эксплуатации наших БЛА ни один самолет не был потерян при полете под управлением автопилота.
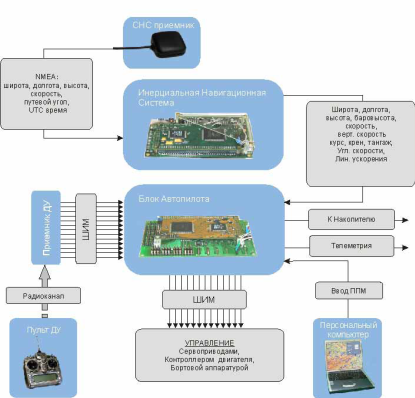
Еще одной важной функцией БЛА является управление видеокамерой. В полете стабилизация камеры переднего обзора обеспечивается отработкой колебаний БЛА по крену по сигналам автопилота и данным МИНС. Таким образом картинка видео изображения оказывается стабильной, несмотря на колебания ЛА по крену. В задачах аэрофотосъемки (например, при составлении аэрофотоплана предполагаемого района проведения работ) точная информация об углах ориентации, координатах и высоте БЛА совершенно необходима для коррекции аэрофотоснимков, автоматизации сшивки кадров.
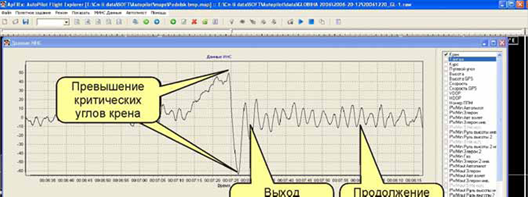

Рис. 7
Беспилотный комплекс аэрофотосъемки также разрабатывается ООО «ТеКнол». Для этого производится доработка цифрового фотоаппарата и его включение в контур управления автопилотом. Первые полеты намечено провести весной 2007 года. Помимо упомянутых систем БЛА быстрого развертывания Бортовой Комплекс Навигации и Управления БЛА эксплуатируется СКБ «Топаз» (БЛА «Ворон»), устанавливается на новом БЛА разработанном компанией «Транзас» (многоцелевой комплекс БЛА «Дозор»), проходит испытания на мини БЛА компании Global Teknik (Турция). Ведутся переговоры с другими российскими и зарубежными клиентами. Изложенная выше информация и, главное, результаты летных испытаний, со всей очевидностью свидетельствуют, что без полноценного бортового комплекса управления, оснащенного настоящей инерциальной системой, невозможно построение современных коммерческих систем БЛА, которые могут решать задачи безопасно, оперативно, в любых погодных условиях, с минимальными издержками со стороны эксплуатирующих служб. Такие комплексы серийно выпускаются компанией «ТеКнол».
Выводы
Рассмотренный состав бортового оборудования БЛА позволяет обеспечить решение широкого круга задач по мониторингу местности и труднодоступных для человека районов в интересах народного хозяйства. Применение в состав бортового оборудования телевизионных камер позволяет в условиях хорошей метеовидимости и освещенности обеспечить высокое разрешение и детальный мониторинг подстилающей поверхности в режиме реального времени. Применение ЦФА позволяет использовать БЛА для проведения аэрофотосъемки в заданном районе с последующей детальной дешифровкой. Использование ТПВ аппаратуры позволяет обеспечить круглосуточность применения БЛА, хотя и с меньшим разрешением, чем при использовании телевизионных камер. Наиболее целесообразно применение комплексных систем, например ТВ-ТПВ, с формированием синтезированного изображения. Однако такие системы пока еще достаточно дороги. Наличие на борту РЛС позволяет получать информацию с меньшим разрешением, чем ТВ и ТПВ, но круглосуточно и при неблагоприятных метеоусловиях. Применение сменных модулей устройств получения видовой информации, позволяет снизить стоимость и реконфигурировать состав бортового оборудования для решения поставленной задачи в конкретных условиях применения. Возможность обеспечения устойчивой связи является одной из важнейших характеристик, определяющих эксплуатационные возможности комплекса управления БЛА. Предложенная система управления пространственным положением остронаправленной АС в комплексах управления БЛА обеспечивает оптимизацию процесса вхождения в связь и возможность восстановления связи в случае ее потери. Система применима для использования на БЛА, а также на пунктах управления наземного и воздушного базирования.
Используемая литература
1. airwar/bpla.html
2. ru./wiki/UAV
3. ispl/Sistemy_upravleniya-BLA.html
4. teknol/products/aviation/uav/
5. Орлов Б.В., Мазинг Г.Ю., Рейдель А.Л., Степанов М.Н., Топчеев Ю.И. - Основы проектирования ракетно-прямоточных двигателей для беспилотных летательных аппаратов.