

Определить реакции опор для способа закрепления бруса, при котором Ма имеет наименьшее числовое значение.
Решение
1. Даны три исходные схемы закрепления бруса (а, б, в,) мысленно в схемах отбросим связи в точках опор, заменяя их реакциями связей.
2. Равномерно-распределённую нагрузку «q» заменяем равнодействующей «Q» и приложим её в центре действия нагрузки «q», получим
Q=q*L
 Q=2*2=4кН.
Q=2*2=4кН.
3. Для каждой схемы составим минимальное число уравнений равновесия для определения исследуемой реакции.
Cоставим уравнения равновесия:
Схема а)
Ma(fк)=0; Ma-P*cos60-P*cos30-M+2Q=0
Отсюда Ma будет
Ma=P*cos60+P*cos30+M-2Q=5+8,6+4–8=9,6кН*м
cхема б)
Мa(Fk)=0; Ма – P*cos60-P*cos30-M+2Q+3Rв
F(кy)=0; Rв-P*cos30=0 Rв=8,6кН
Отсюда Ма будет:
Ма=P*cos60+P*cos30+M-2Q-3Rв=5+8,6+4–8–25,8=16,2кН*м
Ма=16,2кН*м
Схема в)
Ma(Fk)=0; Ма-М-Р*cos60-Р*cos30+2Rc+2Q=0
F(кy)=0; Rc-Pcos30=0 Rc=8,6кН
Отсюда Ма будет:
Ма=М+P*cos60+Р*cos30–2Rc-2Q=7,6кН*м
Ма=7,6кН*м
Таким образом, исследуемая наименьшая реакция будет при закреплении бруса по схеме в). Найдём все реакции.
Составим для этой схемы три уравнения равновесия:

Fкх=0 Q-P*cos60+Xa=0
Fкy=0 Rc-Pcos30=0 Rc=8,6кН
Ма(Fк)=0 Ма-М-Р*cos60-Р*cos30+2Rc+2Q=0
Rc=8,6кН
Xa=1кН
Ма=7,6кН*м
Ответ: Ма=7,6кН.
Д-19
Применение общего уравнения динамики к исследованию движения механической системы с одной степенью свободы.
Дано:
| Сила тяжести |
| G1 | G2 | G3 | G4 |
| 2G | G | G | 8G |
Найти:
Ускорение грузов 1 и 4 найти натяжение нитей 1–2 и 2–4
Схема:
Решение
А (F, Ф)=0 общее уравнение динамики
Возможное перемещение
S1
2=S1/2r2
3=S1/2 r3
Sc=S1/2
Ф1= (G1/g)*a1
М2(Ф)=J2x*2 =((G2/2g)*r32))*a1 /r2
Ф4= (G4/g)*a4
Ф2= (G2/g)*a2
М3(Ф)= J3x*3 = ((G3/2g)*r32)*a1 /2r3
a1= a2= a3
a4= a1/2
Составим общее уравнение динамики
G1S1-Ф1S1-М2(Ф) 2 – Ф4S1–2 (Ф2Sc+ М3(Ф)3)=0

Для определения натяжения нити мысленно разрежем нить и заменим её действием на груз реакцией.
Т1-2
Ф
S
G1 a1
G1S1-ФS1-Т1-2S1=0
Т1-2 = G1-Ф1=1,6 G
Т2-4 = Ф4=1,6 G
Дано:
Va=0
α=30
f=0.2
l=10 м
d=12 м
Определить: τ и h
Решение
1. Рассмотрим движение груза на участке АВ, считая груз материальной точкой. Проводим ось Az и составляем дифференциальное уравнение движения груза в проекции на эту ось:
 (1)
(1)
 (2)
(2)
 (3)
(3)
Подставляя численные значения получаем:
 (4)
(4)
 (5)
(5)
Разделяя переменные, а затем интегрируя обе части, получим:
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
При начальных условиях (Z=0, V=V0)
 (10)
(10)
Тогда уравнение (9) примет вид:
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
Полагая в равенстве (14)  м определим скорость VB груза в точке B (V0=14 м/c, число e=2,7):
м определим скорость VB груза в точке B (V0=14 м/c, число e=2,7):
 м/c (15)
м/c (15)
2. Рассмотрим теперь движение груза на участке ВС; найденная скорость VB будет начальной скоростью для движения груза на этом участке (V0=VB). Проведем из точки В оси Вх и Ву и составим дифференциальное уравнение груза в проекции на ось Вх:
 (16)
(16)
 (17)
(17)
 (18)
(18)
Разделим переменные:
 (19)
(19)
Проинтегрируем обе части уравнения:
 (20)
(20)
Будем теперь отсчитывать время от момента, когда груз находится в точке B. Тогда при t=0 V=V0=VB=8,97 м/с. Подставляя эти величины в (20), получим

Тогда уравнение (20) примет вид:
 (21)
(21)
 (22)
(22)
Разделим переменные и проинтегрируем обе части уравнения:


Задание К1
Дано:
X=3–3t2+1;
Y=4–5t2+5t/3; (1)
t1=1c;
(X и Y-в см.);
Решение
Координаты точки:


Выразим t через X
 и подставим в (1)
и подставим в (1)
 ;
;
Вектор скорости точки:
 ;
;
Вектор ускорения:
 ;
;
Модуль ускорения точки:
Модуль скорости точки:
Модуль касательного ускорения точки:
 , или
, или


Модуль нормального ускорения точки:
 или
или 
 или
или

Радиус кривизны траектории:
 ;
;

Результаты вычисления:
| Координаты, см | Скорость, см/с | Ускорение, см/с2 | Радиус Кривизны, см |
| X | Y | VX | VY | V | aX | aY | a | aτ | an | ρ |
| 1,00 | 0,66 | -6,00 | -8,30 | 10,26 | -6,00 | -10,00 | 11,66 | 11,62 | 0,96 | 109,80 |
Дано: R2=30; r2=15; R3=40; r3=20
X=C2t2+C1t+C0
При t=0 x0=9  =8
=8
t2=4 x2=105 см
X0=2C2t+C1
C0=9
C1=8
105=C2 *42+8*4+9
16C2=105–24–9=72
C2=4,5
X=4,5t2+8t+9
 =V=9t+8
=V=9t+8
a= =9
=9
V=r2 2
2
R22=R33
3=V*R2/(r2*R3)=(9t+8)*30/15*40=0,45t+0,4
 3=3=0,45
3=3=0,45
Vm=r3*3=20*(0,45t+0,4)=9t+8
atm=r3
=0,45t
atm=R3=40*0,45t=18t
anm=R323=40*(0,45t+0,4)2=40*(0,45 (t+0,88)2
a=
Другие работы по теме:
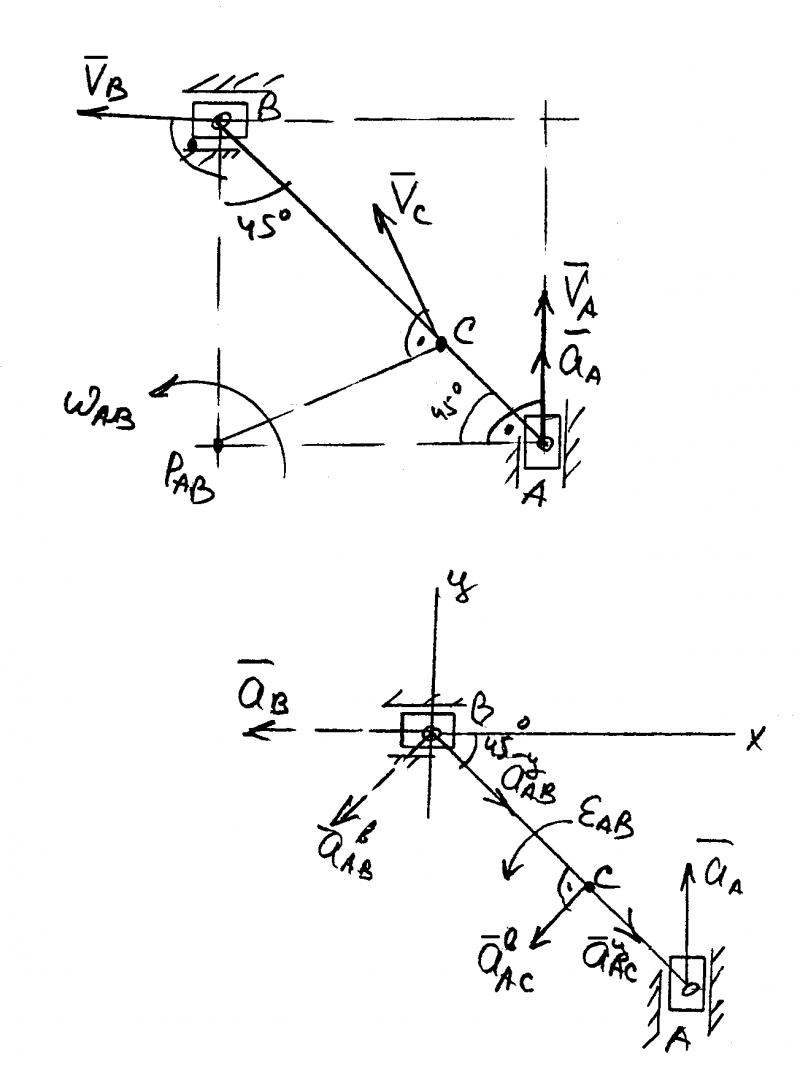
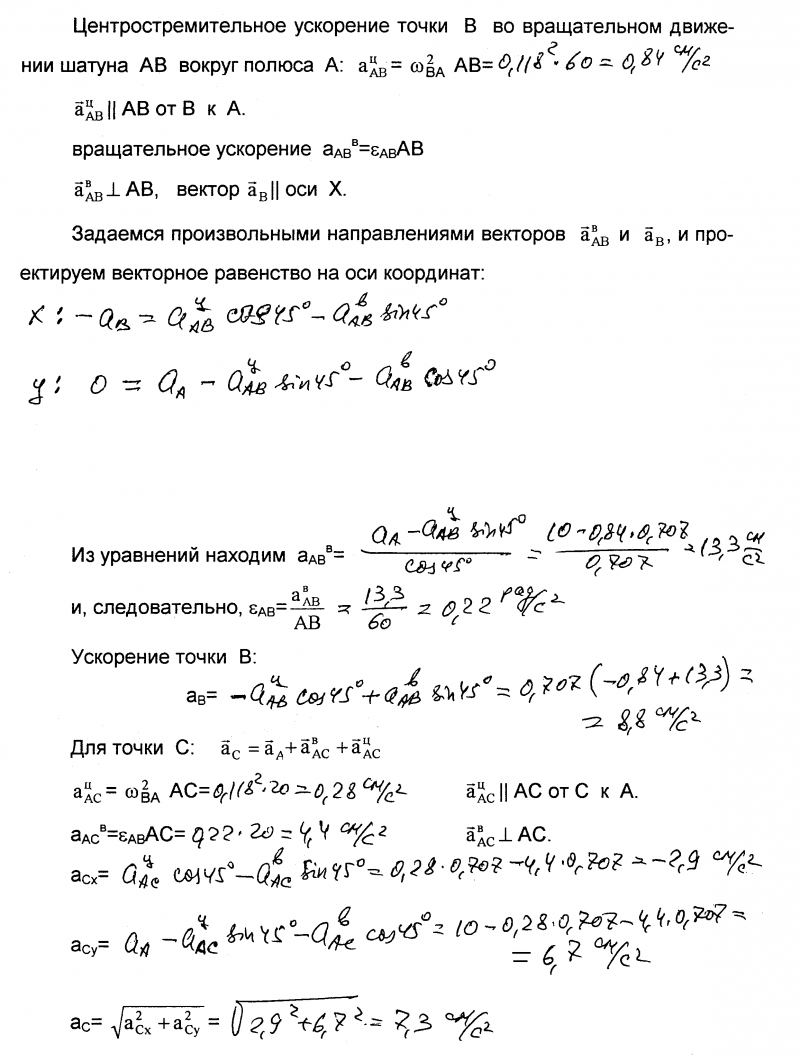
Центр скоростей и ускорение плоскодвижущегося шатуна
Расчет мгновенного центра скоростей и центростремительного ускорения шатуна, совершающего плоское движение. Определение реакции опор для закрепления бруса, при котором Ма имеет наименьшее значение. Нахождение модуля ускорения и модуля скорости точки.
Физика. Билеты к экзамену за 9 класс
Физика 9 кл. Бровкиной Билет №1 Механическое движение. Система отсчета. Материальная точка. Траектория. Путь и перемещение материальной точки. Лабораторная работа. Определение коэффициента трения скольжения.
Шпоры по физике
Определить абсолютное ускорение точки, записать выражение абсолютного ускорения точки в развернутой форме , выбрать систему координат и спроецировать это ур-ние га оси координат.
Физика. Билеты к экзамену за 9 класс
Физика 9 кл. Бровкиной Билет №1 Механическое движение. Система отсчета. Материальная точка. Траектория. Путь и перемещение материальной точки. Лабораторная работа. Определение коэффициента трения скольжения.
Гравитация
Основная задача физики – это объяснить силу гравитации и силу электрического взаимодействия одной теорией. Все материальные точки разбегаются, тогда для любого наблюдателя они имеют некоторую скорость. Вывод формулы гравитационного взаимодействия.
Расчет и проектирование шатуна
Реферат тема: "Расчет и проектирование шатуна" Автор: Кирсанов Эдуард Александрович Примечание: хоть здесь и менее 10 страниц, этот проект по Инженерно-технической подготовке
Расчет привода швейной иглы
Санкт-Петербургский Государственный Институт Сервиса и Экономики Кафедра “Технология ремонта транспортных средств” Расчетно-пояснительная записка к
Задачи по Теоретической менханике
Вариант №10 Задание №1 Определить реакции опор горизонтальной балки от заданной нагрузки Дано: Решение: Рассмотрим равновесие балки (рис. 1). К балке приложена уравновешенная система сил, состоящая из активных сил и сил реакции.
Определение абсолютной скорости и ускорения точки в механизме
Задача Для заданной механической системы определить ускорения грузов и натяжения в ветвях нитей, к которым прикреплены грузы. Массами нитей пренебречь. Трение качения и силы сопротивления в подшипниках не учитывать. Система движется из состояния покоя.
Силовой расчёт рычажного механизма
Проектирование схемы, структурное и кинематическое исследование рычажного механизма, силовой расчет. Расчет геометрических параметров неравносмещенной эвольвентной зубчатой передачи внешнего зацепления из условия отсутствия подрезания. Расчет маховика.
Динамический синтез рычажного механизма
Исходные данные: Число оборотов n1 = 1600, об/мин Длина кривошипа lOA=lOC = 0,065 м Длина шатуна lAB=lCD = 0,26 м длина lAS2=lCS4= lAB/3 Моменты инерции звеньев J1 = 19 кг∙см2
Рычажный и кулачковый механизм
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ НОВГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИМЕНИ ЯРОСЛАВА МУДРОГО ____________________________________________________________________________________________
Принцип качающегося стола
СОДЕРЖАНИЕ 1. Введение .............................................................................................................4
Исследование механизма компрессора
Расчет недостающих размеров и кинематическое исследование механизма, построение плана скоростей для заданного положения. Определение угловых скоростей, планов ускорений, угловых ускорений и сил полезного сопротивления, параметров зубчатого зацепления.
Расчет динамических моментов
Методика и порядок расчета привода подъемно-качающегося стола, предназначенного для передачи слитка с одного ручья прокатного стола на другой. Кинематический анализ механизма. Построение планов скоростей и расчет моментов. Методика выбора муфты.
Привод конвейера ПК-19
Синтез и анализ рычажного механизма. Силовой анализ механизма: расчёт кривошипа, определение мощностей. Геометрический расчет зубчатой передачи. Проектирование планетарного редуктора. Синтез и анализ кулачкового механизма. Результаты работы программы.
Механизм поперечно-строгального станка
Кинематический и силовой анализ рычажного механизма поперечно-строгального станка. Методика определения уравновешивающей силы методом рычага Жуковского. Особенности проектирования планетарного редуктора. Анализ комбинированного зубчатого механизма станка.
Расчет динамических моментов
2.1 Кинематический анализ механизма 3 2.2 Построение нагрузочной диаграммы скорости как функции угла поворота кривошипа 8 4.1 Расчёт статического момента 13
Структурный и кинематический анализ рычажного механизма
Кинематическая схема шарнирного механизма. Определение длины кулисы и масштабного коэффициента длины. Построение плана положения механизма для заданного положения кривошипа методом засечек. Построение плана скоростей. Расчет углового ускорения кулисы.
Кинематический анализ механизмов
Основные задачи и методы кинематического анализа. Изучение движения звеньев механизма вне зависимости от сил, действующих на них. Функция положения механизма. Основные уравнения для определения скоростей и ускорений. Построение диаграммы перемещений.
Кинематическое исследование кривошипно-балансирного механизма
Кинематическая схема механизма кривошипно-балансирного механизма. Начальное положение ведущего звена. Кинематические диаграммы, планы скоростей и ускорений. Определение уравновешивающего момента на ведущем кривошипе, проверка методом рычага Жуковского.
Теория абсолютного движения
АД теория не опирается на постулат относительности, проста, логична, не вводит гипотетические объекты (“эфир”, “темные силы“ и т.д.), не противоречит известным экспериментальным данным.
