Министерство общего и профессионального образования
Российской Федерации
Уральский Государственный Технический Университет
Краснотурьинский Общетехнический Факультет Кафедра физики
ОТЧЁТ
по лабораторной работе №9
«Изучение законов вращательного движения»
Студент Ивашова Н. С. Группа С 171К
Дата
г.Краснотурьинск
2000г.
1. Расчетные формулы:
1.1. Момент силы натяжения нити

где <d> ‑ средний диаметр шкива;
 ‑ масса опускающегося груза, N=0,1,2,3,4;
‑ масса опускающегося груза, N=0,1,2,3,4;
 ‑ высота падения груза;
‑ высота падения груза;
<t> ‑ среднее время опускания груза.
1.2. Угловое ускорение маятника
 .
.
1.3. Момент инерции маятника

где , N=const ‑ задаётся преподавателем;
< > ‑ средняя высота подъема платформы с перегрузками.
> ‑ средняя высота подъема платформы с перегрузками.
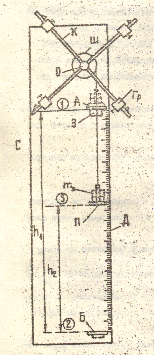
2. Эскиз установки.
3. Средства измерений и их характеристики.
Таблица 1
| Наименование средства измерения | Предел измерения или номинальное Значение | Цена деления шкалы | Класс точности | Предел основной погрешности  
|
| Электросекундомер Металлическая линейка | 99,999 с 50 см | 0,001 с 1 мм |
| 0,0005 с 0,5 мм |
4. Результаты измерений: Установка № 21.
Задача 1. Определения момента инерции  вала и крестовины без грузов и момента сил трения.
вала и крестовины без грузов и момента сил трения.
4.1. Массы платформы  перегрузков
перегрузков  и их погрешности приводятся в таблице, находящейся в лаборатории.
и их погрешности приводятся в таблице, находящейся в лаборатории.
=  =
=
=  =
=



4.2. Измерения высоты опускания груза
=  =
=
4.3. Измерения диаметра шкива. (Диаметр шкива может быть задан преподавателем)
Таблица 2
| d , мм |  , мм , мм
|  , мм , мм
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
<d>=


4.4. Измерение времени опускания груза, расчет  и М.
и М.
Таблица 3
| Масса опускающегося груза, (г) |
| 
| 
| 
| 
|
| Время t опускания груза, (с) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| <t> , c |
|
|
|
|
|
| Угловое ускорение , рад/с2 |
|
|
|
|
|
| Момент М силы натяжения, Нм |
|
|
|
|
|


4.5. Построение графика  определение и
определение и  .
.
4.6. Расчет границ погрешностей результатов измерений.
Использование ЭВМ позволяет оценить средние квадратические отклонения  и
и  , по которым можно вычислить доверительные границы случайных погрешностей
, по которым можно вычислить доверительные границы случайных погрешностей
где  ‑ коэффициент Стьюдента при доверительной вероятности
‑ коэффициент Стьюдента при доверительной вероятности
Р=0,95 и числе наблюдений  (в нашем случае
(в нашем случае  ).
).
Неисключенными систематическими погрешностями пренебрегаем.
Следовательно,

4.7. Окончательные результаты

Задача 2. Определение момента инерции системы четырех цилиндров,
симметрично расположенных относительно оси вращения.
4.8. Измерение массы цилиндра m1 (производится в таблице, прилагаемой к установке ) и массы m падающего груза
m1=
m=m0+Nmn (рекомендуется N=4).
4.9. Измерение расстояние R от оси вращения до центра тяжести цилиндра на крестовине
R=  R=1,1
R=1,1
4.10. Измерение времени t опускания груза и высоты h2 его подъема
Таблица 4
<t>= <h2>=

Средние квадратические отклонения  и
и  :
:

Доверительные границы случайных погрешностей:

Границы неисключенных систематических погрешностей: 
4.11. Вычисление момента инерции <I> крестовины с четырьмя цилиндрами по формуле (3).
4.12. Расчет момента инерции <I1> четырех цилиндров
<I1>=<I>-<I0>=
4.13. Вычисление границы относительной погрешности определения I

где 
4.14. Граница абсолютной погрешности определения I равна

4.15. Граница относительной погрешности результата измерения момента инерции I четырех цилиндров вычисляется по формуле

4.16. Граница абсолютной погрешности результата измерения I1 равна
4.17. Окончательный результат:

4.18. Вычисление теоритического значения момента инерции I2 четырех цилиндров относительно оси вращения в предложении, что они являются материальными точками
где m1 – масса цилиндра;
R ‑ расстояние от оси вращения до центра тяжести цилиндра,
расположенного на крестовине.
4.19. Сравнение результата I2 с полученными из опыта I1 и оценка относительной погрешности, возникающей при допущении, что цилиндры являются материальными точками

4.20. Выводы:
Другие работы по теме:
Кажимость и действительность
Простой человек, не обремененный знанием физики, просыпаясь рано утром и засыпая поздно вечером, а между делом наблюдая за движением Солнца по небосводу, не имеет и тени сомнения в том, что Солнце вращается вокруг Земли.
Дифференциация и Интеграция
Дифференциация и интеграция (от лат. differentia — разность, различие, integratio — восстановление, восполнение) научного знания — два противоположных, но взаимосвязанных процесса развития научного знания.
Кинетическая и потенциальная энергия 2
Кинетическая энергия — энергия механической системы, зависящая от скоростей движения её точек. Часто выделяют кинетическую энергию поступательного и вращательного движения. Единица измерения в системе СИ — Джоуль. Более строго, кинетическая энергия есть разность между полной энергией системы и её энергией покоя; таким образом, кинетическая энергия — часть полной энергии, обусловленная движением.
Определение момента инерции в машине Атвуда
Определение момента инерции в машине Атвуда Приборы и принадлежности: машина Атвуда, набор грузов, секундомер, масштабная линейка. Цель работы: изучение вращательного и поступательного движений на машине Атвуда, определение момента инерции блока и момента сил трения в оси блока.
Физика. Билеты к экзамену за 9 класс
Физика 9 кл. Бровкиной Билет №1 Механическое движение. Система отсчета. Материальная точка. Траектория. Путь и перемещение материальной точки. Лабораторная работа. Определение коэффициента трения скольжения.
Определение момента инерции твердых тел 5
Федеральное Агентство по образованию ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР) Кафедра физики ОТЧЕТ Лабораторная работа по курсу "Общая физика"
Теплоемкость твердых тел 2
7.3. Теплоемкость твердых тел § 1. Понятие о квантовой теории теплоемкости. Фононы Квантовая статистика устранила трудности в объяснении зависимости теплоемкости газов (в частности, двухатомных) от температуры. Согласно квантовой механике, энергия вращательного движения молекул и энергия колебаний атомов в молекуле могут принимать лишь дискретные значения.
Диполи и тела вращения
ГОУ ПВО «Омский государственный технический университет» Кафедра: __________________________________________ Специальность _____________________________________
Кинетические расчеты
Закон изменения угловой скорости колеса. Исследование вращательного движения твердого тела вокруг неподвижной оси. Определение скорости точки зацепления. Скорости точек, лежащих на внешних и внутренних ободах колес. Определение углового ускорения.
Характеристика движения тел
СОДЕРЖАНИЕ 1. МЕХАНИКА ТВЁРДОГО ТЕЛА ДИНАМИКА ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЁРДОГО ТЕЛА. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТЕЛА С ПОМОЩЬЮ МАЯТНИКА ОБЕРБЕКА 3
Определение величин по теоретической механике
Определение поступательного и вращательного движения твердого тела. Кинематический анализ плоского механизма. Применение теоремы об изменении кинетической энергии к изучению движения механической системы. Применение общего управления динамики к движению.
Структура и принцип работы механизма
СамГУПС Кафедра «Детали машин» Расчетно-пояснительная записка к курсовой работе Содержание Задание на проектирование 1 Краткое описание структуры и принцип работы механизма
Структура и принцип работы механизма
Определение передаточного отношения и разбиение его по ступеням, окружных и угловых скоростей зубчатых колес и крутящих моментов на валах с учетом КПД. Материал и термообработка зубчатых колес. Кинематический и геометрический расчет зубчатой передачи.
Механизация производственного процесса
Детали общего назначения для передачи энергии при вращательном движении, заданного движения или передачи усилия от детали к детали. Машины для подготовки почтовых отправлений к сортировке и отправке. Технические характеристики ленточных транспортеров.
Храповые механизмы
МГТУ им. Н.Э. Баумана РЕФЕРАТ Москва 1999 Храповые механизмы находят широкое применение в шаговых двигателях, грузоподъемных устройствах и различных отраслях техники. Храповой механизм — устройство, допускающее вращение оси в одном направлении и исключающее вращение этой же оси в противоположном направлении.
Механика
Основные сведения о кинематике, динамика поступательного и вращательного движения.
Замечательное уравнение кинематики
В предлагаемой статье рассмотрена возможность расширения сферы применения кинематических уравнений для решения задач механики. Показана возможность переноса метода составления простейших уравнений движения.
Кинематика вращения
Принято считать, что в макромире не существует иных способов движения, кроме опорных (в узком смысле реактивных). Т. е. нет движения без отталкивания (притяжения) от чего (к чему) либо, отбрасывания массы (в смысле причины – начала) и т.д.
Импульсная механика
Импульсная механика рассматривает вопросы взаимодействия материальных тел, движущихся с ускорением и торможением, динамику вращения и кинематику переносного движения в силовых полях СП неинерциальных систем НС.
Сборка и контроль направляющих
Виды направляющих и общие технические требование к их сборке. Сборка узлов с направляющими прямолинейного движения с трением скольжения и качения. Сборка узлов с направляющими вращательного движения с трением скольжения и качения. Контроль направляющих.
Полани, Джон Чарлз
Джон Чарлз Полани (род. 23 января 1929 года, Берлин, Германия) — канадский химик венгерского происхождения, сын известного британского химика и философа Майкла Полани, лауреат Нобелевской премии по химии 1986 года «за внесенный вклад в развитие исследований динамики элементарных химических процессов», которую он разделил с Ли Яном и Дадли Хершбахом.
Моделирование движения на плоскости
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра «Теория механизмов и машин» Моделирование движения на плоскости КУРСОВАЯ РАБОТА по курсу «Информатика»
Общие сведения о гидроударных буровых машинах
Наиболее часто гидроударники используются как вспомогательное звено, способствующее более интенсивному разрушению горных пород на забое – гидроударники для ударно-вращательного и вращательно-ударного бурения.
Производственная вибрация
Виды вибрации. Источники вибрации. Воздействие вибрации на человека. Снижение неблагоприятного действия вибрации.