
Уфимский Государственный Авиационный Технический Университет
Кафедра вычислительной техники
и защиты информации
Реферат.
Тема: ![]() Нелинейные радиолокаторы.
Нелинейные радиолокаторы.
Выполнил: студент
группы ЗИ-216
факультета ИРТ
Карасев Павел
Проверил: доцент, к.т.н.
Машкина И. В.
Уфа 2004 г.
Содержание
Введение 1
Общие сведения о нелинейных локаторах 1
Теоретические и экспериментальные исследования в нелинейной радиолокации 5
Эффект затухания 10
Основные характеристики нелинейных радиолокаторов 11
Заключение 15
Список литературы 17
Введение
На практике используются разнообразные электронные устройства съема информации, не являющиеся радиопередатчиками. В этом и заключается сильная сторона нелинейного локатора, который может обнаруживать и определять местоположение любых электронных устройств, независимо от того, работают они или нет.
Общие сведения о нелинейных локаторах
Одной из наиболее сложных задач в области защиты информации является поиск внедренных ЗУ, не использующих радиоканал для передачи информации, а также радиозакладок, находящихся в пассивном (неизлучающем) состоянии. Традиционные средства выявления такие, как панорамные радиоприемники, анализаторы спектра или детекторы поля, в этом случае оказываются неэффективны. Визуальный осмотр также не гарантирует обнаружение подобных ЗУ, так как современные технологии позволяют изготовлять их с любым видом камуфляжа, прятать в элементах строительных конструкций и интерьера.
Именно эта проблема и привела к появлению совершенно нового вида поискового прибора, получившего название нелинейного радиолокатора. Своим названием он обязан заложенному физическому принципу выявления подслушивающих устройств.
Дело в том, что технические средства промышленного шпионажа являются радиоэлектронными устройствами. В их состав входят полупроводниковые элементы (диоды, транзисторы, микросхемы), для которых характерен нелинейный вид вольтамперной характеристики, связывающей протекающий через p-n-переход электрический ток I с приложенным напряжением U. Наличие такой нелинейной связи приводит к возникновению на выходе полупроводникового прибора бесконечно большого количества переменных напряжений (гармоник) с частотами fn = n*f0, где n = 1,2,3... (любое натуральное число), а f0- частота зондирующего сигнала, действующего на входе полупроводникового прибора. Сам факт возникновения сигнала с частотой f0 на входе полупроводникового элемента обязан явлению наведения ЭДС и токов в случайных антеннах, которыми могут оказаться проводники печатных плат или другие компоненты ЗУ при облучении их высокочастотным сигналом.
Таким образом, нелинейный локатор - это прибор, который просто реализует следующий принцип: излучает электромагнитную волну с частотой f0, а принимает переизлученные сигналы на частотах f0. Если такие сигналы будут обнаружены, то в зоне действия локатора есть полупроводниковые элементы, и их необходимо проверить на возможную принадлежность к ЗУ.
В соответствии с вышесказанным нелинейный радиолокатор обнаруживает только радиоэлектронную аппаратуру и, в отличие от классического линейного радиолокатора, «не видит» отражений от окружающих предметов, то есть обладает высокой избирательностью.
Эффективность выявления радиоэлектронных устройств по признаку наличия нелинейных элементов определяется не только техническими параметрами аппаратуры, но и свойствами обследуемого объекта – перекрытия, стены, мебель и т.п. Практика применения НРЛ показала, что отклики на гармониках сигнала облучения создаются не только специальными полупроводниковыми приборами, но и различными металлическими элементами конструкций, которые контактируют между собой.
Наиболее типичными структурами, создающими помехи, являются металлический каркас и арматура железобетонных зданий, металлические конструкции оконных и дверных коробок, арматура подвесных потолков и пр. Образующиеся нелинейные элементы выявляются НЛР аналогично “настоящим” полупроводникам.
Источниками помех для его работы также могут служить контакты со слабым прижимом, для которых характерно наличие промежуточного окисного слоя (сваленных вместе канцелярские скрепки, монеты, плетеные сетки) или просто подверженные коррозии металлы. В редких случаях (при большой мощности излучения) нежелательный эффект могут дать паяные и сварные соединения.
![]()
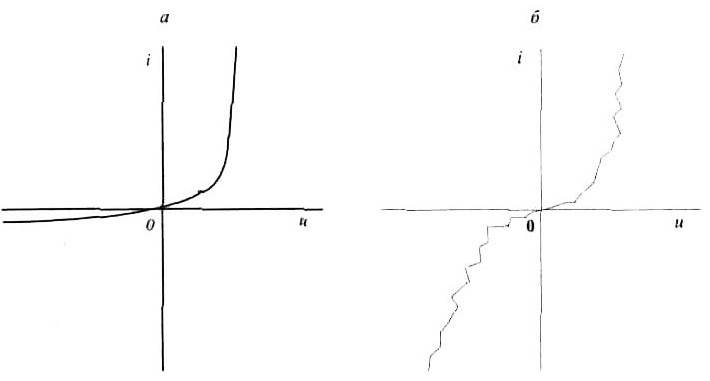
Рисунок 1. Вольтамперные характеристики соединений, вызывающих появление высших гармоник в переизлученном сигнале: а - характеристика p-n-перехода полупроводникового прибора; 6 - характеристика случайного перехода «металл-окисел-металл»
Нелинейные элементы, образованные в результате механического контакта металлических поверхностей через тонкую пленку окисла по аналогии, условно, назовем “ложными” (контактными, коррозийными) полупроводниками.
Причина возникновения указанных помех связана с тем, что слабые металлические контакты, как правило, представляют собой квазинелинейные элементы с устойчивым p-n-переходом, вызванным наличием окислов на поверхности металлов. В физике полупроводников подобные структуры известны как: металл-окисел-металл», а нелинейные элементы такого типа называются МОМ-структурами. Вольтамперная характеристика случайного соединения, в отличие от характеристики p-n-перехода, обычно симметрична. Примерный вид ее показан на рисунке 1(б).
При достаточно малой толщине окисной пленки (менее десятков A) основным механизмом переноса носителей через контакт является туннельный эффект. При небольших напряжениях (менее 1 В) и одинаковых металлах, ВАХ контакта можно аппроксимировать полиномом третьей степени. При напряжении на контакте более ~ 1,5 В ВАХ становится более крутой, а при дальнейшем увеличении – неустойчивой и в большинстве случаев наступает необратимый пробой контакта. Существенной особенностью ВАХ контактных полупроводников является ее неустойчивость при механическом воздействии (изменении давления на контакт).
Теоретические и экспериментальные исследования в нелинейной радиолокации
Интенсивные исследования в области нелинейной локации начались в начале 60-х гг. минувшего века, хотя эффект нелинейного взаимодействия был обнаружен еще в 1939 г. на судах ВМС США как эффект "ржавого болта", приводящий к помехам при работе мощных коротковолновых судовых радиостанций. При рассмотрении взаимодействия ЭМП и нелинейного перехода на основе металлического контакта все внимание было уделено анализу преобразования частоты для третьей гармоники. В 70-х гг. интенсивность исследований резко возросла. В 1972 г. создается опытный образец американской НРЛС METTRA с мощностью излучения 1 кВт, несущей частотой 750 МГц и частотой следования импульсов 10 кГц. В это же время проводятся теоретические расчеты и экспериментальные исследования с этим локатором для наклонного зондирования объектов в приповерхностном слое. Аналогичные работы велись и в России. Нетрудно понять, что эти исследования проводились с целью обнаружения мин, в том числе с электронными взрывателями. Широкое применение последних впервые было осуществлено Великобританией во время военного конфликта на Фолклендских островах. Позднее были проведены экспериментальные исследования локатора METTRA на третьей гармонике для обнаружения с вертолета замаскированной бронетанковой техники. Результаты были отрицательными. Дальность (высота) обнаружения оказалась неудовлетворительной. В известных работах по НРЛ, все исследования сводились к определению нелинейной эффективной поверхности рассеяния (НЭПР) металлического контакта s и ее зависимости от плотности потока падающей мощности (Ппад.). Но эта зависимость напрямую связана с зависимостью коэффициента нелинейного преобразования энного порядка (xn) от величины подводимой к контакту мощности. Расчет значения xn является наиболее трудоемким процессом. Зависимость НЭПР металлического контакта от наведенной ЭДС для третьей гармоники имеет квадратичный характер от подводимой мощности.
В начале 80-х гг. публикации иностранных исследователей по НРЛ резко прекратились. Однако отечественные исследования показали, что экспериментальные значения дальности обнаружения на второй гармонике не совпадали с расчетами по предложенной модели для третьей гармоники. Это потребовало проведения теоретических расчетов зависимости x2 =f(Рпр объект). Параллельно были проведены теоретические расчеты зависимости x2, x3 от частоты зондирующего сигнала.
Следует отметить, что ВАХ любого p-n-перехода обладает температурной зависимостью, а, следовательно, и xn также будет зависеть от температуры.
Расчеты проводились как для СВЧ, так и для низкочастотных диодов.
На рис. 1 показана зависимость x2 = f(Рпр НЭ) для диода 2А605Б, из которой следует, что x2 = k Рпр НЭ, где k = dx/dРпр НЭ = const и для условий расчета k = 2,14х10-5 (1/Вт) в интервале Рпр НЭ = (10-3e5,5) Вт.
На рис. 2 приведена зависимость x2, x3 = f(t,оС), подтвержденная экспериментально. Расчеты и эксперимент показывают, что x3 более чувствительна к изменению температуры. Этот факт очевиден и из теории полупроводниковых приборов. Температурная зависимость x имеет большое практическое значение в условиях российского климата со средними перепадами температур от -30оС до +40оС. При практическом использовании локатора, например, в условиях Чечни для обнаружения радиоуправляемых фугасов, этот фактор также будет влиять на максимальную дальность обнаружения в зависимости от погодного сезона.

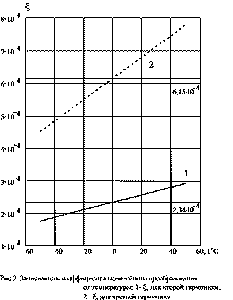
Полученные теоретические результаты свидетельствуют, что x2, а, следовательно, и s2 прямо пропорциональны величине принимаемой объектом мощности (рис. 1), что равнозначно линейной зависимости от Ппад и Ризл локт
Экспериментальные исследования Рпр лок от дальности для нелинейного отражателя в виде симметричного вибратора с диодом 2А605Б проводились в безэховой камере, близкой к свободному пространству, и показали, что Рпр лок = f(1/r4). Был проведен эксперимент по наклонному зондированию малоразмерного сложного объекта. И здесь зависимость принимаемой мощности от дальности для второй гармоники полностью соответствовала классической. Первое практическое применение отечественного нелинейного локатора на второй гармонике произошло во время боевых действий в Афганистане для обнаружения противотанковых мин с электронными взрывателями производства стран НАТО. Второе применение мощного локатора осуществилось аналогично локатору METTRA на вертолете для обнаружения остатков разбившегося в 1992 г. вертолета в Тюменской области.
Таким образом, основное уравнение для НРЛ на второй гармонике будет иметь вид:

где Gвибр пр, Gвибр изл - коэффициенты приемной и излучающей антенн вибратора (объекта) для lизл - принимаемой длины волны и lизл/2 - второй гармоники частоты, излучаемой вибратором соответственно.
В соответствии с моделью канала наблюдения в НРЛ уравнение (1) можно записать как для радиолокационного наблюдения с активным ответом в режиме "свой - чужой". В канале с активным ответом активный ответчик принимает частоту запроса с lзапрос, формирует свой сигнал на частоте ответа с lответ № lзапрос, при этом антенны ответчика согласованы как на прием, так и на передачу.
В нелинейной локации ситуация аналогичная: активный ответчик - нелинейный объект принимает частоту запроса от НРЛ с lизл локт, а ответ посылает на преобразованной частоте гармоник с lответ = lизлокт/n, где n - номер гармоники. Разница в том, что здесь одна и та же антенна объекта принимает излучение генератора и излучает преобразованную длину волны как ответчик. При этом ни приемная, ни излучающая антенны нелинейного ответчика не согласованы ни на прием, ни на излучение преобразованного сигнала. КПД преобразования принятой мощности (энергии) в мощность (энергию) гармоник соответствует безразмерной величине xn, которая очень мала, при этом для разных гармоник имеет свою зависимость от Рпр.
Тогда (1) можно преобразовать к классическому виду активного наблюдения:

где: r1 - расстояние от локатора до объекта, r2 - расстояние от объекта до локатора, и представляют уравнение связи для НРЛ.
Уравнение связи в НРЛ постоянно используется оператором во время поисковых мероприятий. При неизменной мощности излучения происходит регулировка чувствительности приемника, что указывает на изменение расстояния r2 в сторону уменьшения, хотя принимаемая объектом мощность в этом случае возрастает.
Здесь под круглой скобкой - величина мощности, принимаемая вибратором как активным ответчиком и подводимая к нагрузке; под квадратной скобкой - величина мощности второй гармоники, преобразованной нелинейным вибратором - ответчиком; под фигурной скобкой - величина плотности потока мощности, излучаемая ответчиком - вибратором. Последний сомножитель представляет собой эффективную площадь Sа приемной антенны локатора на частоте второй гармоники.
При рассмотрении реального объекта можно видеть, что его антенна - это статистически неопределенный набор (ансамбль) элементарных вибраторов, нагруженных на нелинейные элементы, имеющих произвольные значения длин l и расположенных в пространстве произвольным образом. Этот же набор элементарных вибраторов является и излучающей антенной объекта. При этом происходит взаимное влияние вибраторов друг на друга по всему ансамблю. Задача математического моделирования антенны со статистически неопределенным ансамблем взаимно дополняющих активных элементов антенны с различными параметрами на сегодня не решена.
Однако не следует забывать, что НЭПР не является const даже для одного и того же объекта, а представляет собой многофункциональную зависимую величину: s = f[Ппад = f(Ризл. локт, r), lизл., t,оС].
Для эталонного нелинейного отражателя, параметры которого на прием - излучение и величина принимаемой отражателем мощности, подводимой к нагрузке - поддаются расчету, следует использовать уравнение наблюдения с активным ответом по (2). Уравнения (1, 2) применимы к любой гармонике. На заре теоретических исследований по нелинейной локации формально была введена зависимость Рпр. локт. от дальности в степени (2n+2, 2mn+2) безо всякой привязки как к параметрам самого локатора, так и к частотной зависимости, хотя очевидно, что излучаемая объектом мощность есть функция Ризл. объект. = f(xn).
В дальнейшем было рассмотрено влияние антенно-фидерного тракта нелинейного объекта в виде рупорной антенны на дальность его обнаружения, и приведен расчет при внеполосном зондировании для обнаружения малозаметных летательных объектов типа ракеты Patriot с помощью НРЛС на второй гармонике преобразованного сигнала. Расчет проводился для оптимизации частоты излучения локатора с целью уменьшения его мощности при заданной дальности обнаружения ракеты в три километра. Выбор модели с рупорной антенной продиктован тем, что позволяет смоделировать коэффициент усиления антенны от единиц до 3х103, что соответствует коэффициенту усиления фазированных антенных решеток любого типа, моделировать в широких пределах рабочий диапазон частот антенны объекта при наиболее простом, но строгом математическом моделировании самой антенны.
Многие результаты по нелинейной локации до сих пор не подлежат публикации в открытой печати.
Несмотря на свою специфичность, принципы нелинейной локации нашли себе и «мирное применение». Впервые принципы нелинейной радиолокации были применены еще в середине 70-х годов, когда на контрольно-пропускных пунктах заводов и складов установлены устройства предупреждения о попытке скрытного выноса радиоаппаратуры или ее электронных компонентов. После этого идеей заинтересовались спецслужбы и стали разрабатываться приборы обнаружения скрытых электронных средств разведки и радиовзрывателей.
Так, например, в настоящее время получили широкое распространение системы обнаружения несанкционированного выноса предметов из магазинов, поиск людей в снежных завалах и разрушенных зданиях, контроль багажа авиапассажиров и т. д.
Первым устройством, поступившим на вооружение спецслужб, в частности ЦРУ, был локатор Superscout, серийный выпуск которого начался с 1980 года. В 1981 году появился британский Broorn, который несколько уступал американскому аналогу. Наш отечественный серийный локатор появился в 1982 году и назыался «Орхидея». Правда, раньше ему предшествовали несколько уникальных образцов, но они были сняты с появлением «Орхидеи».
Эффект затухания
М ногие профессионалы полагаются на “эффект затухания” при идентификации полупроводниковых соединений.
ногие профессионалы полагаются на “эффект затухания” при идентификации полупроводниковых соединений.
Если вы слушаете демодулированный аудиоотклик от полупроводника, при приближении к нему антенны НЛ произойдет значительное понижение шумов. При удалении антенны шум усилится и достигнет нормального уровня. Аудиошум имеет наименьшую величину непосредственно над полупроводником и нормальный уровень - в стороне от него, При приближении антенны НЛ к ложному полупроводнику аудиосигнал может усилиться и достигнуть максимума непосредственно над ним или в некоторых спучаях уровень шума понизится как в случае с настоящим полупроводником. При удалении антенны аудиошум достигнет собственного уровня.
Очень важно понять, что в основе теории “аффекта затухания” лежит очень простой процесс. В общем говоря, если НЛ излучает немодулированный сигнал, то принимаемый гармонический сигнал также будет немодулированным, что и выражается в звуковом “эффекте затухания”.
Аудиодемодупяция, необходимая для “эффекта затухания”, может быть реализована как в импульсных, так и в НЛ постоянного излучения
Основные характеристики нелинейных радиолокаторов
К основным характеристикам нелинейных радиолокаторов относятся:
- значения рабочих частот зондирующих сигналов;
- режим излучения и мощность передатчика;
- форма, геометрические размеры и поляризация антенн;
- точность определения местоположения переизлучающего объекта;
- чувствительность приемника; максимальная дальность действия и глубина, на которой возможно обнаружение закладки внутри радиопрозрачного материала;
- количество анализируемых гармоник;
- размеры, вес и тип питания радиолокатора.
Рассмотрим эти характеристики более подробно.
Значения рабочих частот передатчиков всех типов локаторов находятся в пределах от 400 до 1000 МГц (рабочие частоты приемников, соответственно, составляют удвоенную или утроенную частоту передатчиков). Однако большинство отечественных и зарубежных образцов работают в диапазоне, близком к 900 МГц. Такой выбор обусловлен компромиссом в решении следующего противоречия:
С одной стороны, чем ниже частота зондирующего излучения, тем лучше его проникающая способность внутрь предметов и сред, в которых могут быть спрятаны ЗУ, и больше относительный уровень высших гармоник в переизлученном сигнале; с другой - чем выше частота излучения, тем уже диаграмма направленности антенны локатора при фиксированных геометрических размерах, следовательно выше плотность потока мощности зондирующего сигнала (кроме того, на высоких - частотах лучшими свойствами обладают случайные антенны, в качестве которых выступают ножки навесных элементов, проводники печатных плат и т. п., а их размеры, невелики).
К сожалению, многие нелинейные радиолокаторы функционируют на фиксированных частотах без возможности перестройки. Причина такого подхода - упрощение схемотехнических решений, то есть существенное снижение цены. Расплачиваться за такое упрощение приходится худшими эксплуатационными характеристиками, так как на частотах приема могут присутствовать излучения посторонних радиоэлектронных средств. И если даже уровни мешающих сигналов невелики, их может быть достаточно для нарушения нормальной работы радиолокаторов, так как чувствительность приемных устройств очень велика.
Естественно, более удобны в эксплуатации локаторы, имеющие возможность перестройки в определенном диапазоне. Так, например, в нелинейном локаторе Orion (NJE-400) фирмы Research Electronics International (REI) предусмотрен автоматический режим выбора рабочей частоты в диапазоне 880...1000Мгц. Ее оптимальное значение определяется по наилучшим условиям приема для 2-й гармоники частоты зондирующего сигнала.
От рабочей частоты зависит форма и геометрические размеры антенн, важной характеристикой которых является поляризация. Передающие антенны имеют, как правило, линейную, а приемные - круговую поляризацию.
Точность определения местонахождения радиоэлектронного устройства, которую позволяют достигать используемые размеры антенн, соответствует нескольким сантиметрам. Например, для локаторов «Родник» и «Циклон» - это 2 см.
Следующей группой характеристик нелинейных локаторов являются режим работы передатчика, излучаемая мощность и чувствительность приемника.
![]() В зависимости от режима работы нелинейные локаторы делятся на локаторы с непрерывным и импульсным излучением. Практически все зарубежные приборы и некоторые отечественные работают с непрерывными зондирующими сигналами малой мощности (10...850 мВт). Большинство отечественных локаторов работают в импульсном режиме излучения с пиковой мощностью 5...400 Вт. Из-за простоты используемых приемных устройств импульсные локаторы значительно дешевле непрерывных.
В зависимости от режима работы нелинейные локаторы делятся на локаторы с непрерывным и импульсным излучением. Практически все зарубежные приборы и некоторые отечественные работают с непрерывными зондирующими сигналами малой мощности (10...850 мВт). Большинство отечественных локаторов работают в импульсном режиме излучения с пиковой мощностью 5...400 Вт. Из-за простоты используемых приемных устройств импульсные локаторы значительно дешевле непрерывных.
Следует отметить, что высокая мощность и характер излучении импульсных локаторов могут создать определенные проблемы в плане электромагнитной совместимости со средствами связи, навигации, телевещания, датчиками пожарной и охранной сигнализации и т. д. Кроме того, зондирующее излучение оказывает негативное воздействие на операторов, эксплуатирующих аппаратуру. Поэтому, в соответствии с санитарными нормами, мощность современных локаторов ограничена максимальным значением 3...5 Вт для непрерывного режима и средним значением 0,1...1,5 Вт (до 400 Вт в импульсе) - для импульсного. Однако даже при таких ограничениях у оператора после часа работы часто начинают болеть глаза, так как именно они наиболее чувствительны к СВЧ-излучению.
Некоторые современные нелинейные локаторы имеют возможность изменения мощности зондирующего сигнала. Так, в локаторе NJE-400 уровень непрерывного излучения регулируется в пределах от 0,01 до 1 Вт, а в радиолокаторе «Циклон-М» пиковое значение импульсной мощности - от 80 до 250 Вт. Более того, приемник локатора Superbroom Plus снабжен функцией автоматического установления мощности излучения в зависимости от величины принимаемого сигнала на 2-й гармонике.
Чувствительность приемников современных нелинейных локаторов лежит в пределах от 10-15 до 10-11 Вт. У импульсных она несколько хуже, что объясняется соответствующим превосходством пиковой мощности импульсных передатчиков (примерно на 35-40 дБ). В большинстве радиолокаторов используются приемники с регулируемой чувствительностью. Диапазон регулировки этого параметра составляет 30...50 дБ.
В соответствии с законом сохранения энергии (чем выше номер принимаемой гармоники n, тем меньше ее амплитуда) в современных локаторах активизируются только 2-я и 3-я гармоники зондирующего сигнала. Тем не менее, нелинейные радиолокаторы являются приборами ближнего действия, так как коэффициент преобразования энергии облучающего сигнала в энергию высших гармоник очень мал. Конкретная дальность действия зависит от множества факторов. В первую очередь, это тип обнаруживаемого устройства, наличие у него антенны и ее длина, условия размещения объекта поиска (в мебели, за преградами из дерева, кирпича, бетона и т. п.).
Максимальное расстояние, на котором возможно выявление ЗУ ограничено величиной 0,5 м. Данное значение соответствует варианту работы на открытых площадях или в больших необорудованных помещениях, например таких, как готовящийся к сдаче строительный объект. Для офисных помещений возможности обнаружения еще скромнее. Это связано с высокой концентрацией различных «помеховых» объектов (канцелярские принадлежности, оргтехника и т. п.).
С понятием максимальной дальности действия тесно связана максимальная глубина обнаружения объектов в маскирующей среде. Для строительных конструкций она может достигать несколько десятков сантиметров. Например, локаторы серии «Циклон» обнаруживают радиоэлектронные изделия в железобетонных стенах толщиной до 50 см, в кирпичных и деревянных - до 7 см.
Важной характеристикой является и количество анализируемых гармоник переизлученного сигнала. Так как одновременный прием на двух гармониках зондирующего сигнала дает неоспоримые преимущества по сравнению с однотональным приемом: он дает возможность осуществлять идентификацию обнаруженных объектов.
Современные нелинейные локаторы имеют небольшие размеры, вес и позволяют работать как от электросети, так и от автономных источников питания (аккумуляторов).![]()
Среди основных способов селекции сигнала на фоне помеховых воздействий, вызванных наличием в обследуемом пространстве случайных преобразователей частоты зондирующего излучения, выделяют следующие:
- по относительному значению уровней принимаемого излучения на 2-й и 3-й гармониках частоты сигнала;
- по характеру изменения амплитуды шума на выходе приемника вблизи переизлучающего объекта;
- реакции объекта на вибровоздействия;
- по наличию информационных признаков в принимаемом сигнале.
1. Этот способ применим для локаторов, снабженных функцией приема на двух гармониках частоты зондирующего сигнала. Он основан на различии преобразующих свойств полупроводниковых элементов и случайных МОМ-структур.
Физическая сущность способа заключается в том, что для полупроводниковых элементов характерен более высокий уровень переизлученного сигнала на 2-й гармонике по сравнению с 3-й (примерно на 20-40 дБ), и наоборот, контактные источники помех переизлучают сигнал на 3-й гармонике с большим уровнем, чем на 2-й.

![]() Рисунок. Способ селекции помех по относительному уровню 2-й и 3-й гармоник переизлученного сигнала: а - обнаружен полупроводниковый элемент; б - в зоне облучения присутствует контактный источник помех
Рисунок. Способ селекции помех по относительному уровню 2-й и 3-й гармоник переизлученного сигнала: а - обнаружен полупроводниковый элемент; б - в зоне облучения присутствует контактный источник помех
2. Характер изменения амплитуды шума на выходе приемника локатора также может служить признаком наличия объекта с нелинейной вольтамперной характеристикой.
Так, при приближении антенны локатора к месту расположения полупроводникового элемента в головных телефонах, подключенных к выходу приемника, наблюдается значительное понижение уровня шума (примерно на 8-10 дБ). Минимальное значение Uш имеет место на расстоянии AR от дислоцируемого объекта, не превышающем 5 см.
И наоборот, уменьшение расстояния между антенной и случайной МОМ-структурой сопровождается некоторым возрастанием уровня шума.
Применение данного способа может быть несколько ограничено следующими двумя факторами: данный способ может быть реализован только в локаторах, оснащенных амплитудным детектором; некоторые типы случайных электрических контактов вызывают не увеличение, а уменьшение амплитуды шума на выходе приемника радиолокатора.
3. Весьма эффективным способом селекции истинных полупроводниковых объектов на фоне ложных является физическое воздействие на исследуемый участок, например, методом простукивания. Характер звука в головных телефонах при этом позволяет судить о типе переизлучающего объекта: в случае ложного соединения в наушниках возникает типичное потрескивание на фоне тонального сигнала; в случае полупроводникового элемента сигнал остается чистым.
При использовании локаторов, работающих на двух гармониках, анализ объекта методом простукивания сопровождается наличием дополнительной информации о случайном объекте: хаотичным изменением уровня на световых индикаторах.
4. Ряд отечественных локаторов («Переход», «Родник-ПМ» и «Энвис») обеспечивают дополнительный способ анализа принятого от объекта сигнального отклика, а именно прослушивание процессов, происходящих в активно функционирующем объекте. Так, могут быть прослушаны речь, передаваемая подслушивающим устройством, тон таймера электронного взрывателя и т. п. Принцип получения этого эффекта аналогичен процессу модуляции при высокочастотном навязывании. Последний режим распознавания обеспечивает практически 100-процентную идентификацию объекта.
Заключение
Важно понять, что во время работы нелинейного локатора происходят два процесса: обнаружение нелинейного соединения и выявление различий между настоящими и ложными полупроводниками. О нелинейном локаторе нужно судить как по дальности обнаружения, так и способности различать эти соединения.
Наиболее важной характеристикой НЛ является дальность обнаружения - глубина проникновения сигнала в предметы, находящиеся в месте поиска. Однако концепция этой характеристики должна пониматься правильно и использоваться только для сравнения НЛ во время испытаний в одинаковых условиях. Более того, большая дальность обнаружения не обязательно хopoшо характеризует НЛ; вы можете просто обнаруживать электронные устройства (компьютеры, телефоны) в соседней комнате. Во время работы НЛ должен иметь не только достаточную дальность обнаружения, но и возможность соответствующей регулировки (обычно с помощью регулировки мощности передатчика или за счет регулировки степени усиления сигнала приемника) для обеспечения необходимой глубины обнаружения в обследуемом материале. Исторически модели нелинейных локаторов в Соединенных Штатах основывались лишь на сравнении второй и третьей гармоник. Однако также важно использовать методы аудио анализа полупроводниковых соединений, такие, как “эффект затухания” и физического воздействия. Для максимальной надежности хороший нелинейный локатор должен использовать несколько методов идентификации настоящих и ложных полупроводников.
СПИСОК ЛИТЕРАТУРЫ:
А.А.Хорев. Способы и средства защиты информации. М.: МО РФ, 1998. – 316 с.
Т.Джонс. Обзор технологии нелинейной радиолокации. Специальная техника. № 3, 1999 г.
Н.С.Вернигоров. Принцип обнаружения объектов нелинейным радиолокатором. Конфидент, № 5,
Штейншлейгер В.Б. Нелинейное рассеяние радиоволн металлическими объектами. "Успехи физических наук", 1984 г., т. 142, вып. 1, с. 131.