
Санкт-Петербургский государственный политехнический университет
Факультет при ЦНИИ РТК.
Отчет по дисциплине: Проектирование сложных систем.
Тема: Классификация промышленных роботов.
Работу выполнила:
студентка гр. 4174/1 Гордиенко Д.А.
Работу проверил:
Зав. Кафедрой ИКТП Голландцев Ю.А.
Санкт-Петербург
2010 г
Типы промышленных роботов:
Промышленный робот прямоугольной системы координат.
Промышленный робот цилиндрической системы координат.
Промышленный робот сферической системы координат.
Промышленный робот угловой системы координат.
Промышленный робот смешанной системы координат.
1)Прямоугольная система координат.
В прямоугольной (декартовой) системе координат звенья механической системы имеют прямолинейные перемещения по трем (или двум - при плоской системе) взаимно перпендикулярным осям X, Y, Z. Рабочая зона промышленных роботов имеет форму прямоугольника или параллелепипеда
ModularRobot (фирма Sciaky)
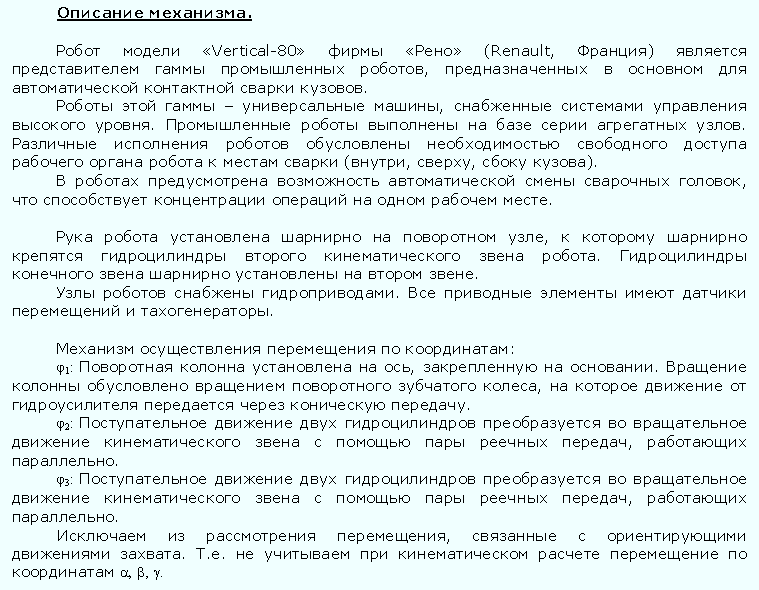
Предназначен для комплектации поточных линий сварки при массовом производстве автомобильных кузовов.
Паспортные данные
Кинематическая схема робота

Для приведения реальной кинематической схемы робота к расчетной,
исключаем из рассмотрения перемещения, связанные с ориентирующими движениями захвата, т.е. замораживаем угловые перемещения.
Проведем расчет ускорений по формулам:

| Параметры | ρ1 | ρ2 | ρ3 | |||
| qimin | 0,60 | м | 1,00 | м | 0,70 | м |
| qimax | 1,40 | м | 1,80 | м | 1,90 | м |
| q`imax | 0,50 | м/c | 0,42 | м/c | 0,33 | м/c |
| КТР | 0,10 | 0,10 | 0,10 | |||
| q``imax | 2,00 | м/с2 | 1,41 | м/с2 | 1,31 | м/с2 |
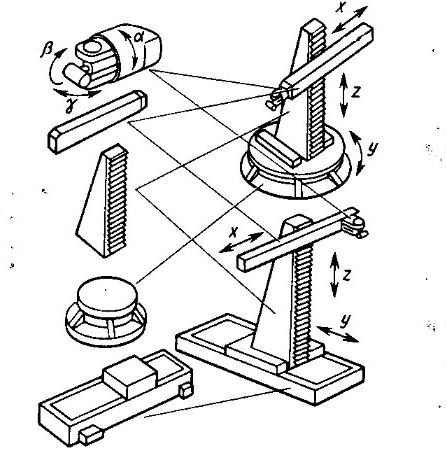
2)Цилиндрическая система координат
Цилиндрическая система координат характеризуется перемещением рабочего органа промышленного робота в основной координатной плоскости в направлениях r и φ, а также по координате Z. Рабочая зона в этом случае имеет форму цилиндра, размеры H, L и угол φ определяют ее параметры.
AL-400S
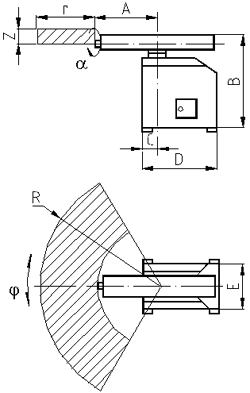
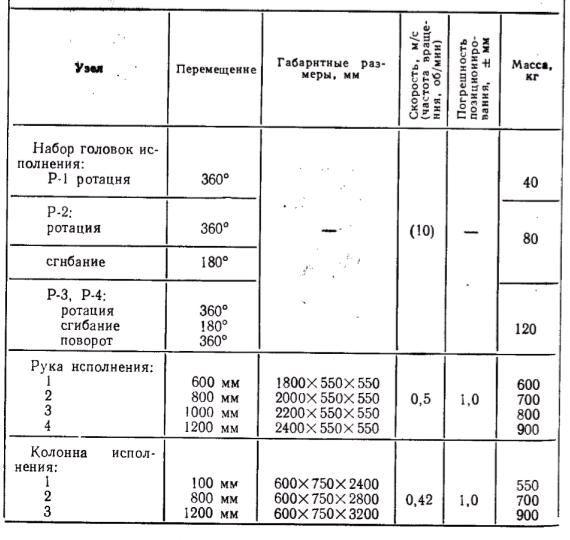
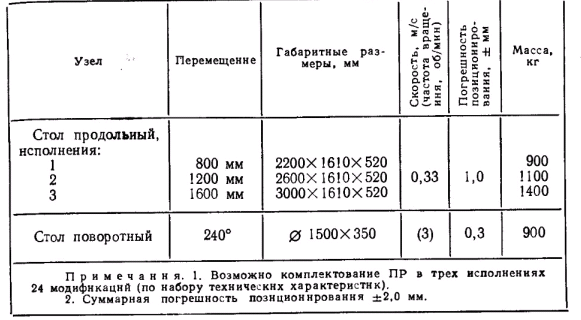
Паспортные данные:

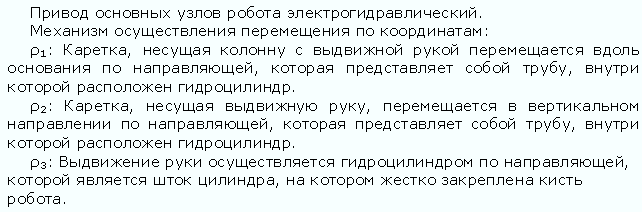
Механизм осуществления перемещения по координатам:
φ1: Поворот колонны осуществляется двумя пневматическим цилиндром через пару цепных передач, работающих параллельно.
ρ1: Каретка, несущая выдвижную руку, перемещается в вертикальном направлении по основной направляющей, установленной внутри поворотной колонны. Дополнительными направляющими являются штоки двух пневматическим цилиндром, на которых жестко закреплена каретка.
ρ2: Выдвижение руки осуществляется пневматическим цилиндром по направляющей, которой является шток цилиндра, на котором жестко закреплена кисть робота.
Кинематическая схема робота
Для приведения реальной кинематической схемы робота к расчетной исключаем из рассмотрения перемещения, связанные с ориентирующими движениями захвата. Т.е. не учитываем при кинематическом расчете перемещение по координатам α, γ.
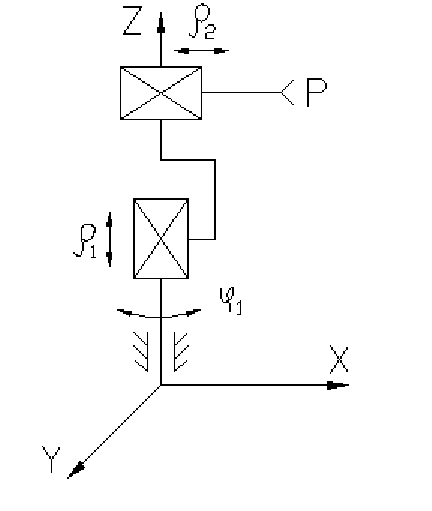
Проведем расчет ускорений по формулам:
| Параметры | φ1 | ρ2 | ρ3 | |||
| qimin | -1,05 | рад | 0,90 | м | 0,50 | м |
| qimax | 1,05 | рад | 1,05 | м | 0,80 | м |
| q`imax | 1,05 | рад/c | 0,50 | м/c | 0,50 | м/c |
| КТР | 0,20 | 0,30 | 0,20 | |||
| q``imax | 2,63 | рад/с2 | 5,56 | м/с2 | 4,17 | м/с2 |
Проведем расчет массы звеньев по следующим формулам.
mсхвата=(0.5 ![]() 1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
mоснования=(0.2 ![]() 0.5)M∑ mi=dSl∑
0.5)M∑ mi=dSl∑
mориент=n*mгр ( 0.5 ![]() 1.5) Mr∑=m1 + m2+ m3 + mоснования
1.5) Mr∑=m1 + m2+ m3 + mоснования
![]() =
= ![]() d=7800кг/м3
d=7800кг/м3
| mгруза | 5 | кг | mсхвата | 5 | кг |
| M∑ | 250 | кг | mоснования | 50 | кг |
| n | 0 | mориент | 0 | кг |
| Параметры | 1 звено | 2 звено | 3 звено |
| l∑ (м) | 0.5 | 0.42 | 0.48 |
| Kзаполнения =(0.1 | 0.1 | 0.2 | 0.2 |
| Sсеч (м2) | 0.2 | 0.05 | 0.016 |
| mi (кг) | 156 | 32.7 | 19.8 |
Mr∑=258.6кг
![]()
3) Сферическая система координат.
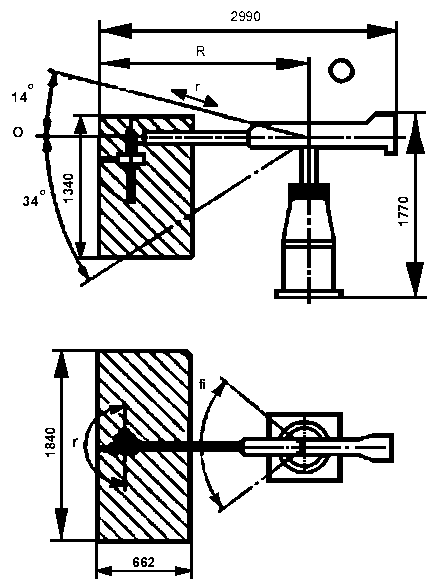
Сферическая система координат характеризуется перемещением рабочего органа в точку пространства за счет перемещений по радиус-вектору r и угловым перемещениям φ и θ в двух взаимно перпендикулярных плоскостях. Рабочая зона промышленного робота имеет в этом случае форму шара.
Robot welder
Сфера применения: сварочные работы .
Паспортные данные

Механизм осуществления перемещения по координатам:
φ1: Поворот колонны осуществляется за счет преобразования прямолинейного движения гидропривода во вращательной движение поворотного зубчатого колеса с помощью реечной передачи.
φ2: Движение от гидроусилителя передается через коническую передачу на винт шариковинтовой передачи. Перемещение руки в вертикальной плоскости осуществляется за счет поступательного движения вдоль оси винта гайки, шарнирно связанной с кронштейном, установленном на нижней плоскости корпуса руки
ρ1: Выдвижение руки осуществляется гидроцилиндром по направляющей, которой является шток цилиндра, на котором жестко закреплена кисть робота.
Кинематическая схема робота
Проведем расчет ускорений по формулам:
| Параметры | φ1 | ф2 | ρ1 | |||
| qimin | -1,90 | рад | -0,24 | рад | 1,00 | м |
| qimax | 1,90 | рад | 0,59 | рад | 1,88 | м |
| q`imax | 0,52 | рад/c | 0,52 | рад/c | 0,15 | м/c |
| КТР | 0,10 | 0,20 | 0,10 | |||
| q``imax | 0,71 | рад/с2 | 1,63 | рад/с2 | 0,26 | м/с2 |
Проведем расчет массы звеньев по следующим формулам.
mсхвата=(0.5 ![]() 1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
mоснования=(0.3 ![]() 0.5)M∑ mi=dSl∑* kзап= dSl∑(0.1
0.5)M∑ mi=dSl∑* kзап= dSl∑(0.1 ![]() 0.5)
0.5)
mориент=n*mгр ( 0.5 ![]() 1.5) Mr∑=m1 + m2+ m3 + mоснования
1.5) Mr∑=m1 + m2+ m3 + mоснования
![]() =
= ![]()
| mгруза | 13.6 | кг | mсхвата | 10.88 | кг |
| M∑ | 560 | кг | mоснования | 140 | кг |
| n | 2 | mориент | 27.2 | кг |
| Параметры | 1 звено | 2 звено | 3 звено |
| l∑ (м) | 1.34 | 1 | 1.4 |
| Kзаполнения =(0.1 | 0.2 | 0.3 | 0.25 |
| Sсеч (м2) | 0.01 | 0.05 | 0.04 |
| mi (кг) | 256.4 | 117 | 60.3 |
Mr∑=573.6кг
![]()
4)Угловая система координат
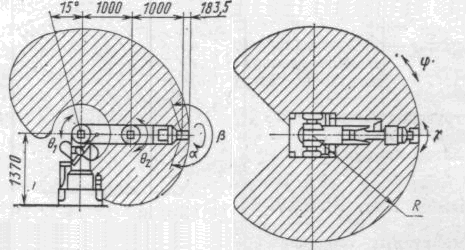
Угловая плоская или пространственная (цилиндрическая и сферическая) система координат характерна для движения многозвенных шарнирных рук ПР. Объект манипулирования перемещается в направлении радиус-вектора r за счет относительных угловых поворотов звеньев руки, имеющий постоянную длину.Vertical-80
Сферы применения: точечная сварка
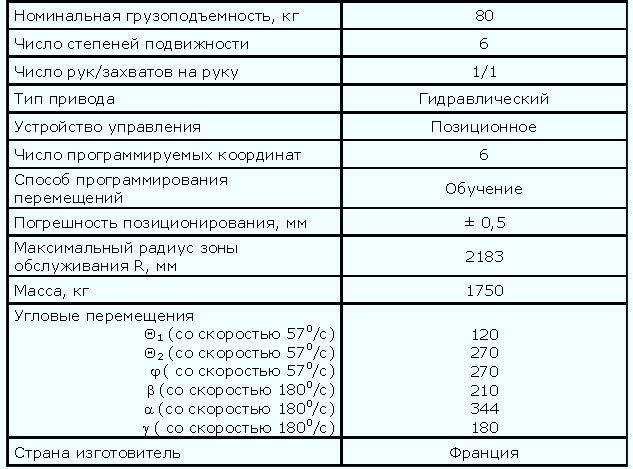
Паспортные данные
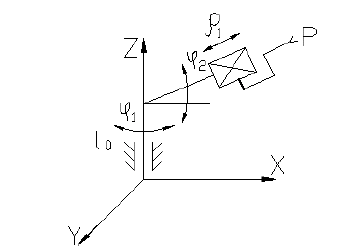
Чтобы привести данный робот к расчетной кинематической схеме, можно "заморозить" ориентирующие степени подвижности А, В, С. Тогда робот можно рассматривать как робот в угловой системе координат.
Проведем расчет ускорений по формулам:
| Параметры | φ1 | ф2 | ф3 | |||
| qimin | -2,35 | рад | -0,26 | рад | -2,35 | рад |
| qimax | 2,35 | рад | 1,83 | рад | 2,35 | рад |
| q`imax | 1,00 | рад/c | 1,00 | рад/c | 1,00 | рад/c |
| КТР | 0,20 | 0,30 | 0,20 | |||
| q``imax | 1,06 | рад/с2 | 1,59 | рад/с2 | 1,06 | рад/с2 |
Проведем расчет массы звеньев по следующим формулам.
mсхвата=(0.5 ![]() 1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
mоснования=(0.3 ![]() 0.5)M∑ mi=dSl∑* kзап= dSl∑(0.1
0.5)M∑ mi=dSl∑* kзап= dSl∑(0.1 ![]() 0.5)
0.5)
mориент=n*mгр ( 0.5 ![]() 1.5) Mr∑=m1 + m2+ m3 + mоснования
1.5) Mr∑=m1 + m2+ m3 + mоснования
![]() =
= ![]()
| mгруза | 80 | кг | mсхвата | 64 | кг |
| M∑ | 1750 | кг | mоснования | 700 | кг |
| n | 2 | mориент | 96 | кг |
| Параметры | 1 звено | 2 звено | 3 звено |
| l∑ (м) | 0.3 | 0.3 | 0.17 |
| Kзаполнения =(0.1 | 0.25 | 0.3 | 0.4 |
| Sсеч (м2) | 0.014 | 0.014 | 0.05 |
| mi (кг) | 485 | 330.6 | 344.4 |
Mr∑=1863 кг
![]()
5)Смешенная система координат
Роботы этого класса обладают, как правило, малой грузоподъемностью и высокой точностью позиционирования. Используются для автоматизации сборочных операций, распределения наполнителей, в «чистых» производствах.
Toshiba SR-854HSP
Широкое применение на операциях сборки, перемещения, упаковки, обслуживания конвейеров в различных отраслях промышленности.
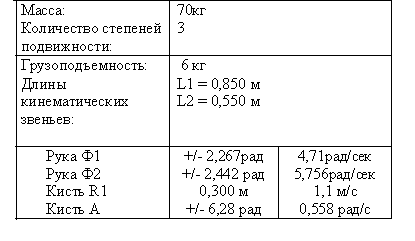

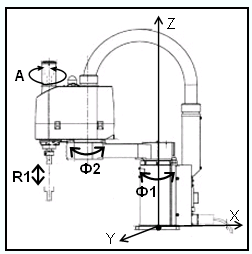
Движение по координате Ф1 и Ф2 осуществляется за счет исполнительного электродвигателя, присоединенного соосно с осью вращения через планетарный редуктор, который обеспечивает высокое передаточное число и высокую точность, при малых габаритах.
Перемещение захвата по (изменение координаты R1) происходит за счет пневмоцилиндра, давление необходимое для работы цилиндра подводится извне, вместе с электрическими линиями.
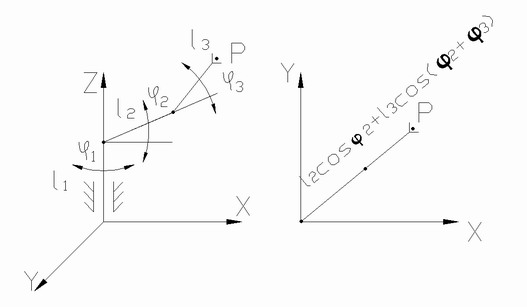
Кинематическая схема робота. Чтобы привести данный робот к расчетной кинематической схеме, можно "заморозить" ориентирующую степень подвижности А. Тогда робот можно рассматривать как робот в смешанной системе координат. 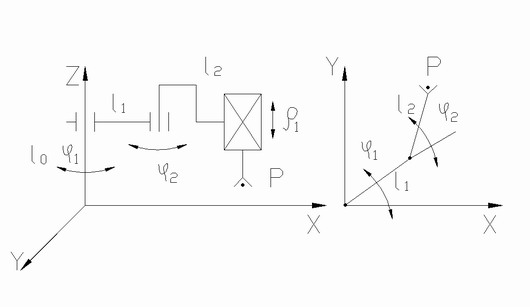
Проведем расчет ускорений по формулам:
| Параметры | φ1 | ф2 | ρ1 | |||
| qimin | -2,27 | рад | -2,44 | рад | 0,10 | м |
| qimax | 2,27 | рад | 2,44 | рад | 0,40 | м |
| q`imax | 4,71 | рад/c | 5,57 | рад/c | 1,10 | м/c |
| КТР | 0,80 | 0,90 | 0,60 | |||
| q``imax | 6,11 | рад/с2 | 7,37 | рад/с2 | 6,72 | м/с2 |
Проведем расчет массы звеньев по следующим формулам.
mсхвата=(0.5 ![]() 1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
mоснования=(0.3 ![]() 0.5)M∑ mi=dSl∑* kзап= dSl∑(0.1
0.5)M∑ mi=dSl∑* kзап= dSl∑(0.1 ![]() 0.5)
0.5)
mориент=n*mгр ( 0.5 ![]() 1.5) Mr∑=m1 + m2+ m3 + mоснования
1.5) Mr∑=m1 + m2+ m3 + mоснования
![]() =
= ![]()
| mгруза | 6 | кг | mсхвата | 3 | кг |
| M∑ | 70 | кг | mоснования | 21 | кг |
| n | 3 | mориент | 9 | кг |
| Параметры | 1 звено | 2 звено | 3 звено |
| l∑ (м) | 0.3 | 0.55 | 0.85 |
| Kзаполнения =(0.1 | 0.2 | 0.2 | 0.2 |
| Sсеч (м2) | 0.04 | 0.02 | 0.004 |
| mi (кг) | 16.5 | 12.87 | 23 |
1
Mr∑=73.6 кг
![]()