Лабораторна №3
Паралельні проекції
Метою разділу є ознайомлення з елементарним математичним
апаратом плоских геометричних проекцій. Для простоти будемо вважати, що при
центральному проектуванні картинна площина перпендикулярна осі z і збігається з
площиною z = d, а при паралельному збігається з площиною z = 0. Проекції
розглядаються в системі координат спостерігача, що є лівосторонньою. Система
координат, в якій вісь х спрямована вправо, вісь у - вгору, а вісь z -
усередину екрана, природньо погоджується з екраном дисплея.
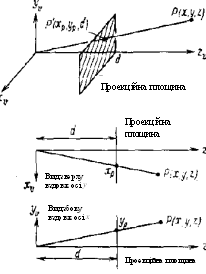
Рис.1 Центральна проекція
Кожну з проекцій можна описати матрицею розміром 4х4. Цей
спосіб виявляється зручним, оскільки з'являється можливість об'єднати матрицю
проектування з матрицею перетворення, представивши в результаті дві операції
(перетворення і проектування) у виді однієї матриці. У цьому розділі ми
одержимо матриці розміром 4х4 для декількох проекцій і насамперед для
центральної. На рис.1 наведені три зображення лівосторонньої системи координат,
у яких точка P проектується на проекційну площину, розташовану на відстані d
від початку координат. Для обчислення координат Xр і Yp проекції точки (x, у,
z) напишемо співвідношения, отримані з подібності трикутників (рис.1):
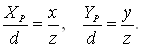
Перемножуючи обидві сторони кожного співвідношення на d,
одержимо

Відстань d є в даному випадку масштабним множником,
застосованим до координат Xp і Yp. Фактором, що приводить до того, що на
центральній проекції більш віддалені об'єкти виглядають дрібніше, ніж ближчі, є
ділення на z. Відзначимо, що допустимі всі значення z, крім z = 0. Точки можуть
розташовуватися як за центром проекції на від’ємній частині осі z, так і між
центром проекції і проекційною площиною.
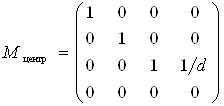
Ці перетворення можна представити у вигляді матриці розміром
4х4:
Множачи точку  на матрицю
на матрицю  . отримаємо загальний вираз для точки
в однорідних координатах
. отримаємо загальний вираз для точки
в однорідних координатах  :
:


геометричний проекція косокутний матриця
Тепер, поділивши на W (що дорівнює z/d) для зворотнього
переходу до трьох вимірів, отримаємо

Цей результат є коректним, оскільки містить перетворену z -
координату з 1, що відповідає положенню проекційної ПЛОЩИНИ ВЗДОВЖ ОСІ 2.
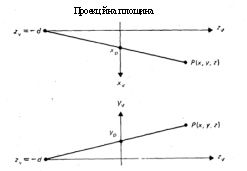
Рис. 2 Інша схема побудови центральної проекції
При іншому представленні центрального проектування,
застосовуваному в деяких роботах, проекційна площина сполучається з площиною 2
= 0, а центр проекції розташовується в точці 2 = - с (рис. 2). З подібності
трикутників випливає

Звідси одержуємо

Матриця записується у виді

Цю матрицю можна одержати з матриці шляхом переносу центра проекції в
початок координат, застосування і зворотнього переносу:

Ортографічне проектування на площину z = 0 очевидне. Напрямок
проектування збігається з нормаллю до площини проекції, тобто в нашому випадку
з віссю z. Таким чином, точка Р має координати:

Ця проекція описується матрицею

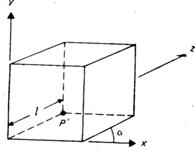
Рис. 3 Косокутна рівнобіжна проекція одиничного куба.
Точка Р' є проекцією точки P (0, 0, 1)
Розглянемо тепер косокутну проекцію, матриця якої може бути
записана виходячи зі значень a і l (рис. 3). На рис. 3 зображений одиничний
куб, спроектований на xy-площину. З малюнка видно, що проекцією точки P (0, 0,
1), що знаходиться на задній стороні' одиничного куба, є точка Р'(l соsа, l
sіnа, 0), що належить площині ху. По визначенню це означає, що напрям
проектування збігається з відрізком РР', що проходить через ці дві точки (рис.
4). Цей напрям є Р'-Р= (l соsа, l sina, -1). Напрям проектування складає кут р
із площиною ху.
Тепер розглянемо довільну точку x, у, z і визначимо її
косокутну проекцію (Хр,Ур) на площину ху. На рис. 5 показані два зображення
точки і проектор, що рівнобіжний проектору, приведеному на рис.4. Рівняння для
x- і y-координат проектора як функцій z мають вид у=mz+b. Вирішуючи два
рівняння относительно Хр і Yр, відзначених на рис.5, одержуємо

Матриця розміром 4х4, що виконує ці дії і, отже, описує
косокутну проекцію, має вигляд
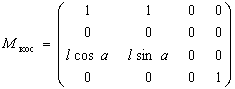
Застосування матриці  приведе до зсуву і наступного
проектування об'єкта: площини з постійною координатою z = z1 переносяться в
напрямку х на z1*l соsa в напрямку y на z1*l sina і потім проектуються на
площину z = 0. Зсув зберігає паралельність прямих, а також кути і відстані в
площинах, паралельних осі z.
приведе до зсуву і наступного
проектування об'єкта: площини з постійною координатою z = z1 переносяться в
напрямку х на z1*l соsa в напрямку y на z1*l sina і потім проектуються на
площину z = 0. Зсув зберігає паралельність прямих, а також кути і відстані в
площинах, паралельних осі z.

Рис. 4. Косокутна паралельна проекція Р'(l соsа, l sinа, 0) проекцією
точки P (0, 0, 1).
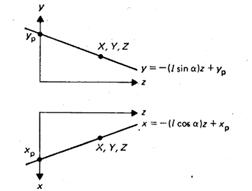
Рис. 5 Косокутна паралельна проекція (Xp, Yp, 0) точки (x, y,
z).
Для проекції кавальє l=1, тому кут р, показаний на рис.4.17,
складає 45°. Для проекції кабіні l=1/2, а b=агtg (2) =63,4°. У випадку
ортографічної проекції l = 0 і b = 90°, тому  є окремим випадком
є окремим випадком  .
.
Другие работы по теме:
Електронні переходи і оболонки
Характеристика окремих електронів у молекулі і їх групування в електронні оболонки. Коливна структура електронно-коливного переходу. Принцип Френке-Кондора. Обертова структура електронно-коливних смуг та правила відбору і типи електронних переходів.
Кинематика, динамика статика. Задачи
вправа 14. 1)Тіло масою 2 кг тягнуть гладенькою горизонтальною поверхнею за допомогою пружини, яка лежить горизонтально і під час руху видовжилась на 1 см. Жорсткість пружини 100 Н/м. З яким прискоренням рухається тіло ?
Випромінювання і спектри
Тема: . План. Спектри випромінювання. Спектри поглинання. Спектроскоп. 4. Спектральний аналіз. 1. Спектри випромінювання Світло сонця, електричної дуги чи лампочки розжарювання розкладаються в суцільну різнобарвну смужку з безперервним переходом одного спектрального кольору в інший, тобто виникає неперервний спектр.
Тривалість інсоляції з урахуванням протилежної будівлі
Санітарні норми та нормативні документи регламентації інсоляційного режиму житлових та громадських споруд та територій житлової забудови. Основні вимоги до умов інсоляції приміщень, розрахунок її тривалості з використанням інсоляційного графіку.
Методи і засоби навчання
Реферат на тему: Методи і засоби навчання Поняття про методи навчання і їх класифікації. Методи організації і здійснення навчально-пізнавальної діяльності.
Побудова зображень предметів на площині
Житомирський Військовий Інститут Національного Авіаційного Уніврситету Реферат на тему: Побудова зображень предметів на площині Житомир 2010 Нарисна геометрія – наука, яка вивчає просторові форми та способи зображення їх на площині.
Аксонометричні проекції
Вивчення стандартних видів аксонометричних проекцій, які застосовуються як допоміжні до комплексних креслень у тих випадках, коли необхідне пояснююче наочне зображення форми деталей. Ізометрія, диметрія, способи їх побудови (осі, коефіцієнти спотворень).
Нарисна геометрія
Сутність і предмет вивчення нарисної геометрії, історія її зародження та розвитку як науки, яскраві представники. Методи проекцій точки та прямої, види та властивості проеціювання. Головні лінії площини. Відображення та проеціювання точок на площинах.
Побудова зображень предметів на площині
Сутність методу проекціювання. Центральні та паралельні проекції. Переваги ортогонального проекціювання перед центральним та косокутним. Положення геометричної фігури в просторі і виявлення її форми по ортогональних проекціях. Закони побудови зображень.
Геометрия Лобачевского
Реферат З геометрії На тему: "Геомтрія Лобачевського" Виконав Учень 10-А класу Середньої школи № 96 Коркуна Дмитро Львів 2000 Нехай тепер АОВ – деякий гострий кут. (рис1) В геометрії Лобачевського можна вибрати таку точку М на стороні ОВ, що перпендикуляр MQ до сторони ОВ не перетинається з другою стороною кута.
Методи перетворення комплексного креслення
Поняття і сутність нарисної геометрії. Геометричні фігури як формоутворюючі елементи простору. Розв'язання метричних задач шляхом заміни площин проекцій. Плоскопаралельне переміщення та обертання навколо ліній рівня. Косокутне допоміжне проектування.
Дослідження кривої й форми поверхні другого порядку
Аналіз рівняння еліпсоїда, властивостей кривих і поверхонь другого порядку. Канонічне рівняння гіперболи за допомогою перетворень паралельного переносу й повороту координатних осей. Дослідження форми поверхні другого порядку методом перетину площинами.
Застосування координатного методу в стереометрії
Зміст Вступ Просторова декартова прямокутна система координат. Рівняння прямої та площини у просторі. Умова паралельності та перпендикулярності двох прямих, двох площин, прямої та площини у просторі.
Поверхневі інтеграли
Суть поверхневих інтегралів першого роду, які є узагальненням подвійних інтегралів. Лист Мебіуса, як приклад односторонньої поверхні. Формула Остроградського-Гаусса, яка встановлює зв'язок між поверхневим інтегралом по замкненій поверхні. Формула Стокса.
Способи перетворення креслення
Сутність основних способів перетворення проекцій: заміни площин проекцій та обертання. Перетворення креслення так, щоб площина загального положення стала паралельною одній з площин проекцій нової системи. Основні положення плоско-паралельного переміщення.
Поверхні
Поняття та властивості поверхонь, їх класифікація та різновиди, відмінні риси. Креслення багатогранників та тіл обертання, правила та закономірності. Перетин поверхонь з прямою та площиною. Побудова лінії перетину поверхонь. Спосіб посередників.
Геометричні фігури на площині та їх площі
Геометричні фігури, що розглядаються в планіметрії - розділі геометрії, в якому вивчають фігури на площині. Визначення кута, трикутника, квадрата, чотирикутника, ромба, паралелограма, трапеції, багатокутника та їх площ античними та сучасними методами.
Секстакорди головних трезвуків
Реферат на тему: 1. Визначення і позначення Секстакордом називається, як відомо, перший обернення тризвуку. Секстакорд позначається цифрою 6, що додається знизу до знака функції, наприклад: Т6, S6, D6.
Поверхні другого порядку
Поняття поверхні другого порядку Поверхнею другого порядку називається множина точок, прямокутні координати яких задовольняють рівняння виду ах2+by2+cz2+dxy+exz+fyz+gx+hy+kz+l=0, (1)
Застосування нарисної геометрії у геодезії
Суть та область застосування метода проекцій з числовими відмітками. Визначення довжини прямої і кута її нахилу до основної площини. Особливість креслень в проекціях з числовими відмітками або планів. Взаємне положення двох площин, прямої та площини.
Інваріантність
ЛЕКЦІЯ ІНВАРІАНТНІСТЬ Вище ми розглянули деякі системи координат і їх зв’язок між собою, припускаюся, що простір являється евклідовим. Наскільки евклідова геометрія може бути справедлива для фізичних явищ, можна судити тільки з експериментальних даних. На сьогодні по крайній мірі для класичної механіки в області простору з характерними розмірами L з інтервалу
Вектори лінійні операції над ними
Пошукова робота на тему: Вектори, лінійні операції над ними. План Вектори і скаляри. Множення вектора на число. Додавання та віднімання векторів. Проекція вектора на вісь.
Лекция 5A Манипуляторы
Маніпулятори За типом керування маніпулятори поділяються на дві основні групи: маніпулятори з ручним та автоматичним управлінням. Маніпулятори з ручним управлінням не мають самокерування. В їхній системі автоматичного регулювання завжди присутня людина. Оскільки рухи цих маніпуляторів синхронно чи паралельно наслідують дії оператора чи копіюють їх, вони називаються синхронні, паралельні та копіювальні маніпулятори, чи маніпулятори системи Master-Slave (M-S-Системи).
