
Построение временных характеристик с помощью пакета Control System
В качестве примера выберем апериодическое звено первого порядка

Для построения временных характеристик с помощью пакета Control System используются функции step и impulse.
Последовательность действий следующая:
Задается описание системы:
- в виде передаточной функции с помощью функции tf:
>> sys = tf ([10], [2 1])
Transfer function:
 10
10
(2 s + 1)
Параметрами функции tf являются вектора коэффициентов числителя и знаменателя.
в виде полюсов, нулей и коэффициента передачи передаточной функции с помощью функции zpk:
>> sys = zpk ([ ], [-0.5], 5)
Zero/pole/gain:
5
( s + 0.5)
Параметрами функции zpk являются вектора нулей, полюсов и коэффициент передачи.
в пространстве состояний с помощью функции ss:
>> sys = ss ([-0.5], [2], [2.5], [0])
Параметрами функции ss являются матрицы состояния системы
A, B, C, D. Строится соответствующая временная характеристика:
переходная – с помощью функции step:
>> step (sys)
импульсная (весовая) – с помощью функции impulse:
>> impulse (sys)
Построение переходной характеристики с помощью SIMULINK
Для определения переходной характеристики САУ необходимо в SIMULINK построить модель системы, к входу подключить блок единичного скачка Step, а к выходу – блок осциллографа Scope. При анализе параметров переходного процесса необходимо учитывать, что по умолчанию в блоке Step время скачка – 1 с, а не 0 с.
Импульсную характеристику нельзя получить с помощью SIMULINK, так как блок, формирующий δ-функцию, отсутствует, а его моделирование путем дифференцирования единичного скачка дает большую погрешность.
Построение частотных характеристик САУ с помощью
пакета Control System
Исходными данными для построения является любое описание системы, применяемые в MATLAB:
передаточная функция:
>> sys = tf ([10], [2 1])
Transfer function:
 10
10
(2 s + 1)
полюсы, нули и коэффициент передачи передаточной функции:
>> sys = zpk ([ ], [-0.5], 5)
Zero/pole/gain:
5
( s + 0.5)
описание в пространстве состояния:
>> sys = ss ([-0.5], [2], [2.5], [0])
описание в виде модели SIMULINK.
Логарифмическая амплитудная и фазовая частотные характеристики строятся в Control System с помощью функции bode:
>> bode (sys)
В качестве параметра задается имя описания системы (передаточной функции). При этом диапазон частот для построения графиков выбирается автоматически. Если выбранный диапазон частот не удовлетворяет поставленным требованиям, его можно задать (0.01…1000 Гц):
>> bode (sys, (0.01 1000))
Амплитудно-фазовая частотная характеристика (АФЧХ) строится с помощью функции nyquist:
>> nyquist (sys)
или, для требуемого диапазона частот
>> nyquist (sys, (0.01 1000))
Следует отметить, что АФЧХ строится как для положительных, так и для отрицательных частот.
Преобразование модели SIMULINK в модель Control System MATLAB
Модель в виде структурной схемы в SIMULINK является более простым и наглядным представлением системы, чем в виде передаточных функций в Control System. В тоже время Control System представляет широкие возможности по анализу САУ. Поэтому часто возникает задача преобразования структурной схемы SIMULINK в модель Control System. Рассмотрим алгоритм такого преобразования.
1) Создание структурной схемы в SIMULINK. Рекомендуется сначала создать схему для моделирования, затем преобразовать ее в схему для анализа. Для этого необходимо отключить задающее воздействие, к входу системы подключить входной порт, а к выходу – выходной порт (блоки In; Out); разорвать главную обратную связь при анализе устойчивости.
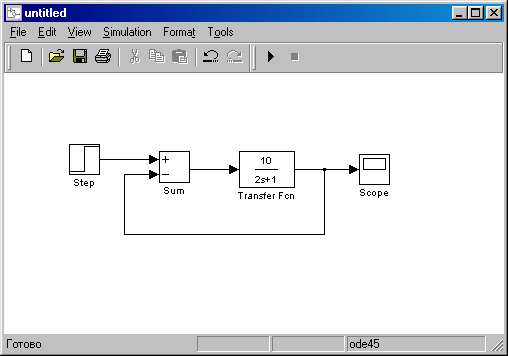 Пример исходной и преобразованной системы приведен на рис. 4.2, рис. 4.3.
Пример исходной и преобразованной системы приведен на рис. 4.2, рис. 4.3.
Рис. 4.2. Исходная модель

Рис. 4.3. Преобразованная модель
2) Извлечение информации из модели:
>> [A,B,C,D] = linmod (‘untitled’)
A =
-0.5000
B =
1
C =
5
D =
0
С использованием функции linmodполучается описание модели в пространстве состояний с помощью матриц состояния A, B, C, D. В качестве параметра функции linmodуказывается имя модели (оно указано в заголовке окна модели).
3) Преобразование матриц состояния в модель Control System:
<< sys = ss (A,B,C,D)
a =
x1
x1 -0.5
b =
u1
x1 1
c =
x1
y1 5
d =
u1
y1 0
Continuous – time mode1.
Параметрами функции ss являются матрицы состояния; sys – имя получаемой модели.
Полученная модель может использоваться для построения временных и частотных характеристик динамических системы:
<< step (sys) ; grid (grid – отображение сетки графика);
<< impulse(sys); grid
<< bode(sys); grid
<< nyquist(sys); grid
Литература
Дьяконов В., Круглов В. MATLAB. Анализ, идентификация и моделирование систем. Специальный справочник. – СПб.: Питер,
2002. – 448с.
Дьяконов В. П. Справочник по применение системы PC MATLAB. – М.: Наука, Физматлит, 1993.
Дьяконов В. П. Компьютерная математика. Теория и практика. – М.: Нолидж, 2001.
Дьяконов В., Новиков Ю., Рычков В. Компьютер для студента; Самоучитель. – СПб: Питер, 2000.
Потемкин В. Г. MATLAB. Справочное пособие. - М.: ДИАЛОГ-МИФИ, 1997.
Потемкин В. Г. MATLAB 5 для студентов. - М.: ДИАЛОГ-МИФИ, 1998.
Потемкин В. Г. Система инженерных и научных расчетов
MATLAB 5.x. Том 1 и 2..- М.: ДИАЛОГ-МИФИ, 1999.
Дьяконов В. П., Абраменкова И. В. MATLAB 5. Система символьной математики. – М.: Нолидж, 1999.
Дьяконов В. П. MATLAB. Учебный курс. – СПб: Питер, 2000.
Дьяконов В. П., Абраменкова И. В., Круглов В. В. MATLAB 5.3.1 с пакетами расширений. – М.: Нолидж, 2001.
Другие работы по теме:
Расчет параметров вентильного электропривода
Принцип действия вентильного электропривода. Формирование вращающего момента, результирующей намагничивающей силы. Электрическая схема переключения полюсов вентильного электропривода. Моделирование переходных процессов. Суммарный момент возмущения.
Обработка электрического сигнала с помощью фильтрации
Методы цифровой обработки сигналов и их применение в различных сферах жизни человека. Характеристика и назначение полосового фильтра, особенности его реализации в цифровой форме. Реализация модели фильтра в Simulink. Возможности тулбокса WAVELET.
Цифровая фильтрация
Исследование обработки детерминированных сигналов в линейных, аналоговых и цифровых цепях
Исследование линейных и нелинейных систем управления
Непрерывная система регулирования, состоящая из объекта регулирования, автоматического регулятора и нелинейной системы, включающей нелинейное звено. Возможность возникновения автоколебаний. Моделирование нелинейной системы автоматического регулирования.
Идентификация и моделирование технологических объектов
Идентификация параметров электромеханической системы. Моделирование нелинейных объектов. Оптимизация параметров пид-регуляторов для объектов управления с нелинейностями с применением пакета прикладных программ Nonlinear Control Design (NCD) Blockset.
Наблюдатель Люенбергера
Непрерывная система с передаточной функцией. Оценка состояния объекта с помощью наблюдателя пониженного порядка. Расчет наблюдателя Люенбергера, оценивание вектора состояний. Решение задачи с использованием MatLab, построение графиков вектора состояния.
Моделирование структурных схем в среде SIMULINK пакета MATLAB
Практические навыки моделирования структурных схем в среде SIMULINK пакета MATLAB. Построение графиков функций в декартовой системе координат. Решение систем линейных и нелинейных уравнений. Работа с блоками Sum, Algebraic Constraint, Gain, Product.
Построение графического интерфейса в системе Matlab
Matlab как система инженерных и научных вычислений, принцип ее работы и назначение, сферы применения и оценка эффективности, анализ сильных и слабых сторон. Алгоритм создания интерфейса, основные способы и методы создания форм и элементов управления.
Дослідження перехідних характеристик цифрових САК
Дослідження цифрових систем автоматичного керування. Типові вхідні сигнали. Моделювання цифрової та неперервної САК із використання MatLab. Результати обчислень в програмі MatLab. Збільшення періоду дискретизації цифрової системи автоматичного керування.
Розрахунок диференційної сиcтеми в MatLab
Структурна схема моделі (пакет MATLAB) та її описання. Математична модель у вигляді передавальних функцій, у вигляді диференційного рівняння. Алгоритм рішення (рекурентне співвідношення) та його програмна реалізація. Системи диференційних рівнянь.
Решение задачи с помощью программ Mathcad и Matlab
Разработка модели движения практически невесомой заряженной частицы в электрическом поле, созданном системой нескольких фиксированных в пространстве заряженных тел. При условии, что тела находятся в одной плоскости, но частица находится вне плоскости.
Решение задачи с помощью программ Mathcad и Matlab
Расчет в программах Mathcad и Matlab связи между глубиной залегания подводной лодки, временем поражения цели и расстоянием, который корабль успеет пройти по горизонтали. При условии, что пуск торпеды производится в момент прохождения корабля над лодкой.
Решение задачи с помощью программ Mathcad и Matlab
Моделирование движения заряженной частицы, падающей вертикально вниз на одноименно заряженную пластину, с помощью программ Mathcad и Matlab. Построение графика зависимости высоты, на которой находится точка, от времени и скорости движения этой частицы.
Решение задачи с помощью программ Mathcad и Matlab
Определение зависимости горизонтальной длины полета тела и максимальной высоты траектории от одного из коэффициентов сопротивления среды, фиксировав все остальные параметры. Представление этой зависимости графически и подбор подходящей формулы.
Решение задачи с помощью программ Mathcad и Matlab
Исследование связи между временем достижения торпеды, снабжённой разгонным двигателем (глубинной бомбы) заданной глубины и формой корпуса противолодочного корабля: сферической, полусферической, каплевидной. Представление этой зависимости графически.
Дискретное преобразование Фурье
Разработка функции вычисления дискретного преобразования Фурье от входного вектора. Исследование свойств симметрии ДПФ при мнимых, четных и нечетных входных сигналах. Применение обратного преобразования Фурье для генерации периодической функции косинуса.
Порядок моделирования входного сигнала
Порядок и методика моделирования входного сигнала, общие принципы представления сигналов математическими моделями. Взаимосвязь математических моделей с компьютерными, их место и значение на современном этапе. Пакеты для моделирования различных процессов.
Идентификация и моделирование систем управления
СОДЕРЖАНИЕ 1. Задание 3 2. Построение аналитической модели и ее анализ. 2.1 Построение аналитической модели 4 2.2 Анализ динамических процессов в системе на основе использования построенной аналитической модели 11
Системы автоматического управления
СОДЕРЖАНИЕ Лабораторная работа №1. Анализ САУ с помощью ЭВМ и программного обеспечения MATLAB/Simulink Цель работы Программа работы Ход работы 1. Построение временных характеристик САУ с помощью пакета Control System
Программирование в MATLAB
Кафедра: Информационные технологии ПРОГРАММИРОВАНИЕ В MATLAB Операторы MATLAB Операторы цикла Цикл Синтаксис for count=start:step:final команды MATLAB
Jet Propulsion Essay Research Paper JET PROPULSIONThermodynamics
Jet Propulsion Essay, Research Paper JET PROPULSION Thermodynamics ME-304 M, T, W, F =* 2:00 – 3:00 June 5, 2000 Introduction: The following report, submitted to Roy Aircraft Engines Incorporated for an efficiency study, is an analysis of a turbojet engine completed by thermodynamically studying each main component that constitutes a turbojet engine.
