
Клапаны предназначены для управления потоками жидких и газообразных сред, транспортируемых по трубопроводам.
Регулирующие и запорно-регулирующие клапаны осуществляют непрерывное изменение расхода регулируемого потока от минимального, когда клапан полностью закрыт, до максимального, когда клапан полностью открыт.
Запорные или отсечные клапаны управляют регулируемым потоком не непрерывно, а дискретно (клапан полностью открыт или полностью закрыт). Как у регулирующих, так и у запорных клапанов есть небольшие протечки регулируемой среды при закрытом положении клапана.
Следует отметить, что деление клапанов на регулирующие, запорные и запорно-регулирующие есть только в нашей стране, также как и отдельные стандарты на протечки для регулирующих и запорных клапанов. Весь остальной мир производит просто регулирующие клапаны, протечки у которых подразделяются на шесть классов, чем выше номер класса – тем меньше протечки. Последние три класса относятся к клапанам, которые у нас называют запорными и запорно-регулирующими.
Под условным диаметром прохода клапана (Ду) следует понимать номинальный внутренний диаметр входного и выходного патрубков клапана (в ряде случаев диаметр выходного патрубка может превышать диаметр входного). Каждому значению условного диаметра прохода клапана соответствует максимально возможное значение расхода регулируемого вещества, которое, в общем случае, зависит от ряда параметров (перепада давления, плотности и др.). Для удобства сравнения клапанов и выбора по результатам гидравлического расчета необходимого типоразмера клапана введено понятие условной пропускной способности.
Условная пропускная способность клапана (Kvy) показывает, какое количество воды при температуре 20 °С может пропустить клапан при перепаде давления на нем 0,1 МПа (1 кгс/см2) при полностью открытом затворе.
Регулирующий клапан состоит из трех основных блоков: корпуса, дроссельного узла и привода клапана. Типичная конструкция проходного
запорно-регулирующего клапана без установленного привода представлена на рисунке 1.
Внутри корпуса клапана 1 устанавливается дроссельный узел, состоящий из седла 2 и плунжера 3, связанного со штоком 4. Седло может быть выполнено в различных конструктивных исполнениях: вворачиваться в корпус клапана как показано на рисунке 1, прижиматься к корпусу специальной втулкой или выполняться заедино с корпусом.
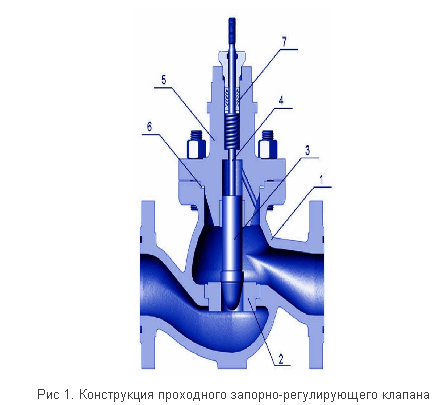
Плунжер скользит по направляющей, выполненной в крышке 5. Между корпусом 1 и крышкой 5 установлена уплотнительная прокладка 6. Шток 4 выводится наружу через сальниковый узел 7, представляющий собой набор подпружиненных шевронных колец из фторопласта-4 или его модификаций. На крышке 5 устанавливается привод, шток которого соединяется со штоком клапана. Привод может быть пневматическим, ручным, электрическим или электромагнитным.
Дроссельный узел является регулирующим и запирающим элементом клапана. Именно в этом узле реализуется задача изменения проходного сечения клапана и, как следствие, изменение его расходной характеристики.
Конкретные комбинации втулка-седло-плунжер выбираются исходя из условий эксплуатации клапана: перепада давления, типа регулируемой
среды и ее температуры, наличия мехпримесей, величины пропускной способности, вязкости среды и т.д.
В большинстве случаев важное значение для работы клапана имеет правильное направление подачи рабочей среды. Оно маркируется стрелкой на наружной поверхности корпусов. Если среда подается через левый канал в корпусе, изображенном на рисунке 1, то такое направление подачи называется «под затвор» (среда подходит к плунжеру снизу), а если среда подается по правому каналу, то такое направление подачи называется «на затвор» (среда прижимает плунжер к седлу в закрытом состоянии). Основные параметры и характеристики типовых регулирующих проходных клапанов, выпускаемых отечественными предприятиями, представлены в таблицах 1 и 2.
Таблица 1.
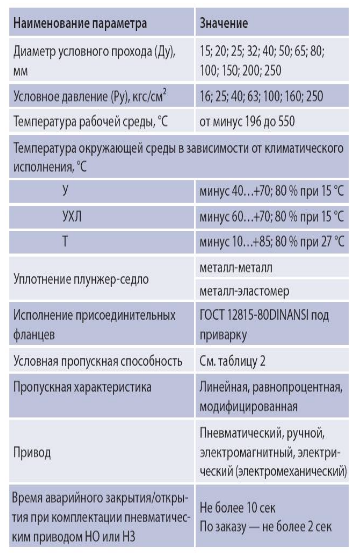
Основные параметры запорно-регулирующих клапанов
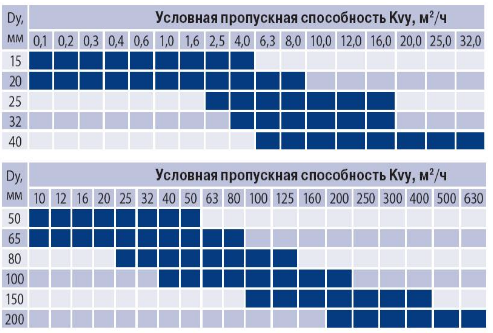
Таблица 2.
Условная пропускная способность запорно-регулирующих клапанов
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Приводы и исполнительные механизмы запорно-регулирующей, регулирующей и запорной трубопроводной арматуры предназначены
для преобразования управляющего сигнала (пневматического, электрического или механического) в механическое (линейное или вращательное) перемещение штока привода и жестко связанного со штоком запорного органа (клапана, шарового затвора, дисковой заслонки, задвижки и т.п.).
Исполнительные механизмы, применяемые для управления запорно-регулирущей арматурой по принципу действия и используемому виду энергии для создания необходимого механического усилия на рабочем затворе подразделяют на:
Пневматические
Электрические
Гидравлические
Комбинированные
Ручные
Пневматические исполнительные механизмы
Пневматические исполнительные механизмы в силу сложившейся традиции занимают достаточно большое место среди приводов для регулирующей арматуры различного типа. Это обусловлено в первую очередь тем, что массовая промышленная автоматизация до 50-х, 60‑х годов прошлого столетия базировалась в основном на пневматике. Пневматические системы автоматизированного управления сегодня, в эпоху микропроцессоров и широкого применения цифровой электроники, смотрятся несколько архаично, и кроме того, они достаточно громоздкие, требуют организации сетей подготовки и распределения сжатого воздуха, который к тому же расходуется при работе пневматических систем.
Вместе с тем, простота конструкции пневмоприводов, а как следствие этого — достаточно высокая надежность и ремонтопригодность их, позволяют успешно использовать такие приводы и в современных системах автоматизированного управления технологическими процессами.
Пневматические исполнительные механизмы предназначены для преобразования изменений давления воздуха Р на выходе регулятора в перемещение регулирующего органа — клапана, заслонки, шибера, крана и т. п. Регулирующий орган изменяет расход потока жидкости, газа, пара и т. п. на объекте управления, и тем самым вызывает изменение регулируемого технологического параметра.
По типу привода пневматические исполнительные механизмы делятся на мембранные, поршневые, поворотные, пневмодвигатели вращающиеся.
Мембранный исполнительный механизм (МИМ)
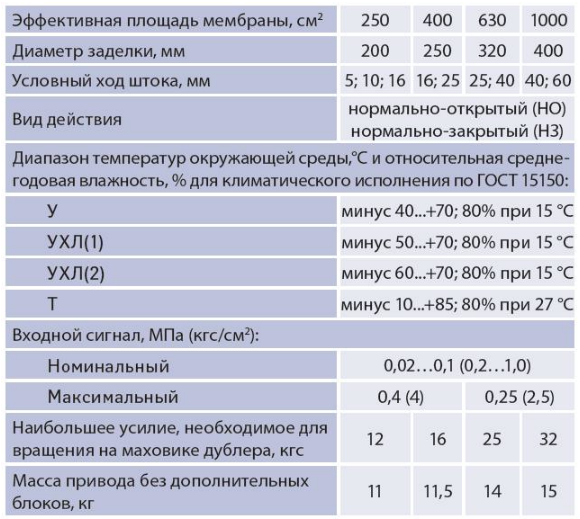
Схема мембранного исполнительного механизма (МИМа) показана на рисунке 2. Перемещение выходного штока 2, соединенного с регулирующим органом, в одну сторону осуществляется силой, которая создается давлением Р, в другую — усилием пружины 3. Сигнал Р поступает в герметичную мембранную «головку», в которой находится мембрана из прорезиненной ткани толщиной 2-4 мм с жестким центром. Снизу на мембрану давит пружина 3. В мембранных исполнительных механизмах (рис. 2) давление управляющего воздуха воздействует на мембрану 4, зажатую по периметру между крышками привода, и создает усилие, которое уравнивается пружиной 3. Таким образом, ход штока 2 привода пропорционален величине управляющего давления. Жесткость и предварительное сжатие пружины определяет диапазон усилий привода и номинальный ход.
Мембранные исполнительные механизмы классифицируют, по размерам мембранных «головок». МИМы поставляются обычно совместно
с регулирующими органами — клапанами. Так как при снятии давления Р мембрана всегда перемещается вверх, то в зависимости от конструкции регулирующего органа различают нормально открытые НО и нормально закрытые НЗ клапаны.
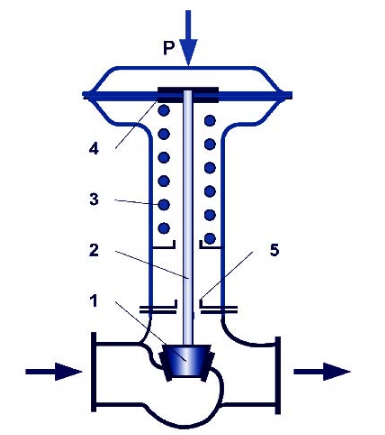
Рисунок 2. Мембранный исполнительный механизм, установленный на регулирующем клапане:
1 - регулирующий орган; 2 - шток; 3 - пружина; 4 - мембрана; 5 - сальник
Статические характеристики большинства МИМов близки к линейным, однако они обладают зоной гистерезиса, составляющей 2—15% от наибольшего значения Р. Эта величина зависит от усилий трения в сальнике 5, от перепада давлений на регулирующем органе, от характеристик пружины и эффективной площади мембраны.
Для уменьшения зоны гистерезиса и улучшения динамических характеристик МИМов на исполнительный механизм устанавливают дополнительные усилители мощности, называемые позиционерами. Различают позиционеры, работающие по схеме компенсации перемещений и по схеме компенсации сил. В позиционерах обоих типов МИМ охватывается отрицательной обратной связью по положению штока, что исключает влияние на статические характеристики сил трения в сальнике, перепада давлений на регулирующем органе и т.п.
Одновременно с этим увеличение расхода воздуха, подаваемого в МИМ и заметно улучшаются динамические характеристики последнего.
Для сопряжения с электрическими сигналами систем управления применяют электропневматические позиционеры, которые кроме улучшения статических характеристик мембранных исполнительных механизмов, обеспечивают преобразование электрического сигнала в импульс управляющего воздуха, подаваемого на МИМ.
Основные технические характеристики МИМов представлены в таблице 3.
Таблица 3.
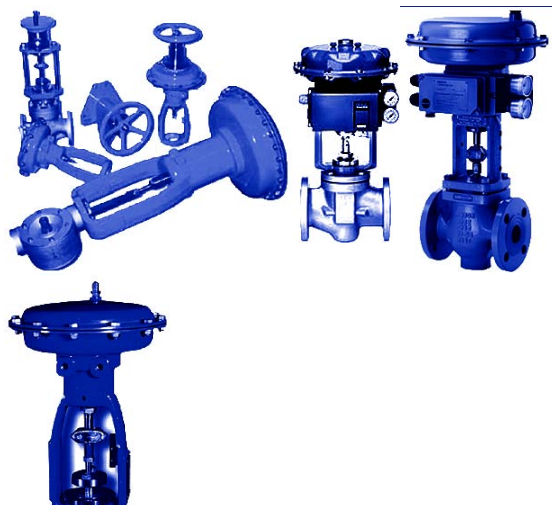
Внешний вид типичных МИМов, устанавливаемых на регулирующих клапанах, представлен на рисунке 3.
Поршневые пневматические приводы
Поршневые пневматические приводы (ППП) применяют в тех случаях, когда требуется линейное перемещение штока исполнительного
механизма на большое расстояние – до 300 мм. Для повышения точности и улучшения динамических характеристик поршневые приводы
снабжают также позиционерами, а сами приводы в этом случае называют следящими.
Схема поршневого пневматического привода представлена на рисунке 4. Механизм поршневого пневматического привода состоит из закрепленного на кронштейне 1 цилиндра 2 с размещенным внутри поршнем 3, жестко соединенным со штоком привода 4, и нескольких пружин 5, ориентированных относительно поршня в зависимости от исполнения привода (нормально открытый НО или нормально закрытый НЗ). Внутренняя поверхность цилиндра имеет антифрикционное покрытие. Наиболее типичная характеристика поршневого пневматического привода приведена в таблице 4. Пневматический поршневой привод работает следующим образом.
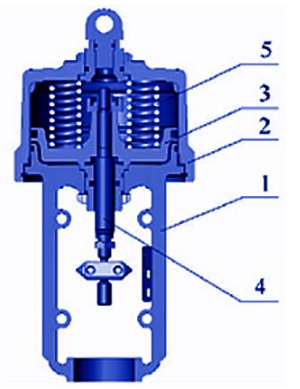
Рисунок 4.
Схематический разрез нормально закрытого поршневого пневматического привода
Пневматический входной сигнал от управляющего устройства поступает в рабочую полость и воздействует на поршень. При этом пружины противодействуют усилию, создаваемому давлением сжатого воздуха, вследствие чего шток перемещается на величину, обратно пропорциональную жесткости пружин.
Таблица 4.
Основные технические параметры поршневого пневматического привода

Поворотные пневматические приводы
Поворотные пневматические приводы типа ППР предназначены для управления трубопроводной арматурой (краны шаровые и пробковые,
затворы дисковые и шиберные и т.п.) при аналоговом или дискретном управлении положением запорного элемента, когда управляющее
воздействие на шток запорного элемента требует поворотного воздействия или приложения к нему вращательного момента.
Поворотные пневматические приводы могут рассматриваться как некоторая разновидность поршневого пневматического привода, где поршень, выполненный в виде лепестка перемещается под давлением управляющего воздуха в специальной камере. Движение силового элемента (лепестка) пневмопривода непосредственно передается на вал запорного элемента трубопроводной арматуры, обеспечивая его требуемое положение.
Внешний вид поворотного пневматического привода представлен на рисунке 5.
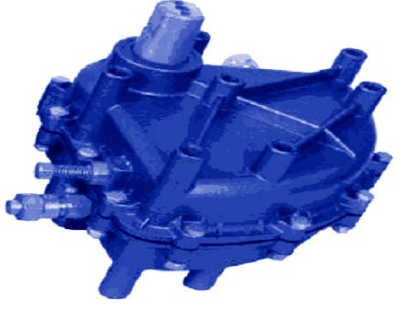
Рисунок 5. Пневмопривод лопастной типа ППР
Основные технические характеристики поворотного пневматического привода следующие:
Основные технические данные и характеристики различных типоразмеров поворотных пневмоприводов представлены в таблице 5.
Поворотные пневматические приводы могут оснащаться дополнительными блоками, обеспечивающими аналоговое или дискретное управление, а также сигнализацию положения вала. Взрывозащищенные блоки имеют маркировку взрывозащиты IExdsIICT6 – виды взрывозащиты «взрывонепроницаемая оболочка».
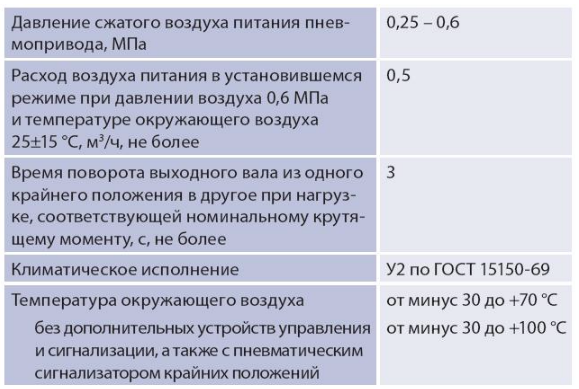
Таблица 5
Основные технические характеристики
поворотных пневмоприводов типа ППР

Дополнительно: