Лабораторная работа № 3
Изучение устройства и принципа действия системы автоматического невелирования асфальтоукладчика
Цель работы: изучить устройство и принцип действия системы автоматического невелирования асфальтоукладчика
Для обеспечения ровности и поперечного уклона асфальтобетонного покрытия на асфальтоукладчиках применяется автоматическая система «Стабилослой-20» (рис. 3.1), работающая от двух или одного копира, в качестве которых может быть использована натянутая вдоль полотна дороги проволока, трос или лыжа, скользящая по уже уложенному покрытию или основанию.
При работе системы от двух копиров с обеих сторон рамы рабочих органов устанавливаются два датчика ДЩБ 6. В этом случае задание угла наклона рамы в поперечном направлении осуществляется за счет разницы положения по высоте одной стороны рамы относительно другой.
Этот способ применяется при работе широкозахватных асфальтоукладчиков с шириной укладки 9—12 м, когда датчик ДКБ не может обеспечить заданной точности.
При работе системы от одного копира датчик ДЩБ устанавливается по одну сторону рамы, а выдерживание заданного угла наклона обеспечивает датчик ДКБ, устанавливаемый на середине поперечной балки укладчика.
Щуп 5 датчика ДЩБ, скользящий по копиру 4, поворачивается на угол соответственно тому, поднимается или опускается асфальтоукладчик при своем движении относительно копира при наезде на неровности основания. Если отклонение щупа датчика превышает его зону нечувствительности, то датчик вырабатывает электрический сигнал, который поступает в блок управления 2, а затем на электромагниты распределителя 8, включающие гидроцилиндры 7 привода рамы 3 рабочих органов. Гидроцилиндры перемещают раму в сторону уменьшения электрического сигнала.
Если рама рабочих органов изменит свое положение в поперечном направлении при работе системы от двух копиров, сигнал вырабатывается вторым датчиком ДЩБ и соответствующий гидроцилиндр перемещает по вертикали край рамы, восстанавливая угол наклона.
При работе системы от одного копира при изменении угла наклона сигнал вырабатывается датчиком ДКБ 1 и подается на золотник гидроцилиндра.
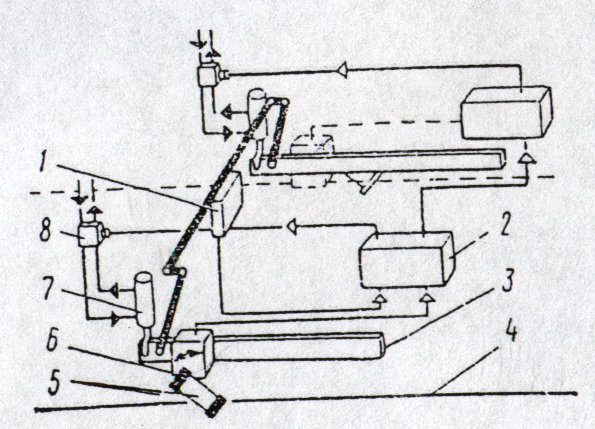
Рисунок- 3.1. Схема расположения аппаратуры системы «Стабилослой-20» на асфальтоукладчике:
1—датчик углового положения рамы рабочих органов; 2 — блок управления; 3—рама рабочих органов; 4--копир; 5 — щуп;
б — датчик щуповой; 7 — гидроцилиндр рамы рабочих органов;
8 — электрогидрораспределитель.
Другие работы по теме:
Изучение контактов и магнитных пускателей
Устройство и принцип работы, неисправности и способы их устранения у контакторов переменного тока и магнитных пускателей. Назначение элементов контактора. Замыкающие и размыкающие контакторы для переключения в цепях управления, блокировки и сигнализации.
Электрический преобразователь давления
Сущность, конструкции и принцип действий преобразователей сигналов, обозначение их параметров. Строение и назначение манометра САПФИР – 22ДИ, а также особенности поступления электрического сигнала к нему. Принцип действия различных видов преобразователей.
Фоторезисторы
ФОТОРЕЗИСТОР (от фото... и резистор), представляет собой непроволочный полупроводниковый резистор , омическое сопротивление которого определяется степенью освещенности . В основе принципа действия фоторезисторов лежит явление фотопроводимости полупроводников. Фотопроводимость- увеличение электрической проводимости полупроводника под действием света.
Разработка автоматического устройства
Вариант №. 8 Контрольная № 2. ОБЯЗАТЕЛЬНО ПЕРЕПИСАТЬ ВРУЧНУЮ!!! Задание 1. Привести описание принципа действия с временной диаграммой и расчет схемы автоколебательного мультивибратора транзисторно-транзисторной логики (ТТЛ).
Система автоматического управления стабилизации уровня вибраций
Построение элементарной схемы и исследование принципа работы системы автоматического управления, ее значение в реализации способа поднастройки системы СПИД. Основные элементы системы и их взаимосвязь. Анализ устойчивости контура и его оптимальных частот.
Расчет системы автоматического управления
Расчет и структурная схема передаточных функций разомкнутой и замкнутой системы автоматического управления (САУ) относительно входного воздействия. Формулы для мнимой и вещественной компоненты. Графики логарифмических амплитудной и фазовой характеристик.
Изучение регулятора УРАН-1М
Автоматизация горных комбайнов и комплексов. Функциональная схема регулятора УРАН. Защита двигателя от "опрокидывания" (остановки). Стабилизация значения тока нагрузки путём автоматического изменения скорости подачи. Цепи дистанционного управления.
а по теме динамика управляемых преобразовательных устройств
Введение. Цели регулирования пу. Анализ простейшей системы позиционного регулирования, сравнительная оценка идеального релейного и линейного регуляторов по быстродействию. Непрерывное и импульсное регулирование, их оценка по энергетике
работа
В данной работе проводится определение коэффициента усиления звена системы управления и анализ устойчивости этой линейной системы. Для этой цели используются
Фоторезистор
Фоторезистор представляет собой непроволочный полупроводниковый резистор, омическое сопротивление которого определяется степенью освещенности.
Синтез последовательного корректирующего устройства
Синтез последовательного корректирующего устройства частотными методами. Обеспечение отсутствия статической ошибки. Оценка запасов устойчивости. Синтезировалось последовательное корректирующее устройство с помощью частотных методов.
Потенциометр
ЛАБОРАТОРНАЯ РАБОТА №4 «ПОВЕРКА АВТОМАТИЧЕСКОГО А» Цель работы Изучение принципа действия и конструкции потенциометров. Знакомство с установкой, ее назначением, возможностями,
Характеристика дискретных систем автоматического управления
Дискретные системы автоматического управления как системы, содержащие элементы, которые преобразуют непрерывный сигнал в дискретный. Импульсный элемент (ИЭ), его математическое описание. Цифровая система автоматического управления, методы ее расчета.
Liberum veto
«Свободное вето» (лат. Liberum veto) — принцип парламентского устройства в Речи Посполитой, который позволял любому депутату сейма прекратить обсуждение вопроса в сейме и работу сейма вообще, выступив против.
Йелинек, Фредерик
Фредерик Йелинек (Frederick Jelinek, 18 ноября 1932, Кладно — 14 сентября 2010) — учёный в области теории вычислительных систем, один из пионеров обработки естественного языка и автоматического распознавания речи. Родился в городе Кладно (Чехословакия). С 1959 по 1962 год преподавал в своём альма-матер — Массачусетском технологическом институте.
Точность систем автоматического управления
Порядок оценки точности системы автоматического управления по величине установившейся ошибки при типовых воздействиях, механизм ее повышения. Разновидности ошибок и методика их вычисления. Определение ошибок по виду частотных характеристик системы.
Изучение принципов микропрограммного управления
Цель работы: Изучение принципов построения микропрограммного устройства управления. Теория: Развитие микроэлектронной базы запоминающих устройств позволило создать память, параметры которой существенно снизили влияние микропрограммирования на производительность процессора и ЭВМ в целом.
Принципы построения систем автоматического управления
Теория автоматического управления как наука, предмет и методика ее изучения. Классификация систем автоматического управления по различным признакам, их математические модели. Дифференциальные уравнения систем автоматического управления, их решения.
Устройства памяти
Text Graphics Презентацию выполняли Корепанова А Макрушина Т Graphics Устройства Памяти Устройства Памяти - устройства памяти данных, которые используются в компьютерах, чтобы хранить данные. Компьютер имеет много типов устройств памяти данных. Некоторые из них могут быть тематическими категориями как сменные Устройства Памяти данных и другие как не сменные Устройства Памяти данных.
Построение структурных схем систем автоматического управления
Предмет: Теория Автоматического Управления Тема: Построение структурных схем систем автоматического управления Введение Структурной схемой системы называется графическое изображение показывающее, из каких элементов состоит система, и каким образом они соединены между собой.
Айзерман Марк Аронович
АЙЗЕРМАН Марк Аронович (1913-92), российский ученый в области теории управления, представитель первого поколения кибернетиков в нашей стране, доктор технических наук.
