
Ф едеральное агентство по образованию
едеральное агентство по образованию
ГОУ ВПО
Уральский государственный
горный университет
Кафедра автоматики и компьютерных технологий
КУРСОВАЯ РАБОТА
ПО ДИСЦИПЛИНЕ:
«ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
Студент______________________________________******
Группа_______________________________________******
Вариант______________________________________156
Проверил_____________________________________ Барановский В.П.
Екатеринбург,2010 г.
Вариант №156
Для автоматической системы, алгоритмическая схема которой приведена на рисунке 1, выполнить следующие расчеты:
При заданных параметрах линейной системы :
| kо = 0,6 | koz =0,3 |
| То = Тоz = 1,6 с | kи = 0,35 |
| Ти = 0,35 с | kу = 20 |
| Ту = 1,2 с | kп = 1,1 |
оценить точность в установившемся режиме по каналу хз-ε при типовом воздействии ао = 7.
При неудовлетворительной точности выбрать значение передаточного коэффициента ky, обеспечивающее требуемое значение сигнала ошибки εз ≤0,5.
С помощью критерия Михайлова проверить устойчивость линейной системы при заданных и выбранных параметрах.
По требуемым показателям качества в переходном режиме σ = 35%; tп = 2 с; М = 1,6 определить структуру и параметры корректирующего устройства.
Методом D-разбиения построить область устойчивости по параметрам kи и То для скорректированной системы.
На АВМ и ЦВМ получить график переходного процесса по каналу хз-ε и сравнить полученные показатели качества с требуемыми.
Для замкнутой скорректированной системы вычислить квадратичную интегральную оценку по каналу хз-ε и определить оптимальное значение коэффициента ky.
Дня замкнутой скорректированной системы вычислить суммарную дисперсию сигнала ошибки при случайных воздействиях с параметрами DХз =60; αХз = 0,1; Sgo = 120 и оптимальное значение ку .
Методом фазовых траекторий на АВМ проанализировать возможность возникновения автоколебаний в нескорректированной системе с нелинейным элементом НЭ с параметрами с = 1, b = 1. Определить амплитуду и частоту автоколебаний, оценить влияние параметров нелинейного элемента на амплитуду и частоту автоколебаний.
Дата выдачи задания Подпись руководителя
Содержание
Оценка точности в установившемся режиме
В данном разделе необходимо оценить точность заданной системы управления (рисунок 1). Данная система управления является статической, поэтому её статическая точность оценивается при ступенчатом воздействии.
 Рис. 1. – Исходная алгоритмическая схема системы управления
Рис. 1. – Исходная алгоритмическая схема системы управления
Запишем передаточную функцию замкнутой системы по каналу хз-ε .

Подставим значения передаточных функций в выражение передаточной функции замкнутой системы:


Запишем теорему Лапласа о конечном значении оригинала для сигнала ошибки:

Подставим значения функции замкнутой системы и сигнал задания :

Вычисляем значение сигнала ошибки ε(t) в установившемся режиме:
ε(∞) ≥ εз = 0,5
Точность системы не удовлетворяет заданной точности εз , вычисляется новое значение передаточного коэффициента управляющего устройства kу , которое позволит обеспечить в системе требуемое значение сигнала ошибки. Запишем выражение для сигнала статической ошибки в общем виде, из которого выразим коэффициент kу .
Новое значение коэффициента kу позволяет обеспечить заданную точность системы по каналу хз-ε.
Вывод: Заданный коэффициент kУ=20 не обеспечивает достаточную точность системы в установившемся режиме, поэтому в данном разделе было вычислено новое значение коэффициента kУ=56,3, позволяющее обеспечить заданную точность системы по каналу ошибки хз-ε в установившемся режиме ε(∞)≤εз = 0,5 .
Проверка устойчивости исходной системы
В данном разделе производится проверка устойчивости системы по критерию Михайлова. Данный критерий основан на анализе характеристического уравнения системы. Исходным выражением для определения устойчивости берем характеристическое уравнение замкнутого контура. Проверка устойчивости проводится с новым, большим передаточным коэффициентом управляющего устройства kу = 56,3.
1+Wрк(р)=0

Приравняв правую часть характеристического уравнения системы к F(p), получаем характеристический полином системы:

Раскрываем скобки, подставляем все коэффициенты и постоянные времени системы и заменяем р на jω (kрк=13):




![]()
Разделим характеристический полином на действительную и мнимую части:


Задаваясь численными значениями ω, вычисляем значения мнимой и действительной части характеристического полинома системы. Результаты вычислений приведены в таблице 1. Годограф Михайлова приведен на рисунке 2.
Таблица 1. – Расчетные данные для построения годографа Михайлова
| ω | P(ω) | Q(ω) |
| 0 | 14 | 0 |
| 0,1 | 13,9 | 0,3 |
| 0,2 | 13,8 | 0,6 |
| 0,3 | 13,7 | 0,9 |
| 0,4 | 13,5 | 1,2 |
| 0,5 | 13,2 | 1,4 |
| 0,6 | 12,9 | 1,7 |
| 0,7 | 12,5 | 1,9 |
| 0,8 | 12,1 | 2,1 |
| 0,9 | 11,6 | 2,3 |
| 1 | 11,1 | 2,4 |
| 1,1 | 10,4 | 2,5 |
| 1,2 | 9,8 | 2,6 |
| 1,3 | 9,0 | 2,6 |
| 1,4 | 8,3 | 2,5 |
| 1,5 | 7,4 | 2,4 |
| 1,6 | 6,5 | 2,2 |
| 1,7 | 5,6 | 2 |
| 1,8 | 4,6 | 1,7 |
| 1,9 | 3,5 | 1,3 |
| 2 | 2,4 | 0,9 |
| 2,1 | 1,2 | 0,3 |
| 2,1651 | 0,4 | 0 |
| 2,1972 | 0 | -0,2 |
| 2,3 | -1,3 | -0,9 |
| 2,4 | -2,7 | -1,7 |
| 2,5 | -4,1 | -2,6 |
| ∞ | -∞ | -∞ |
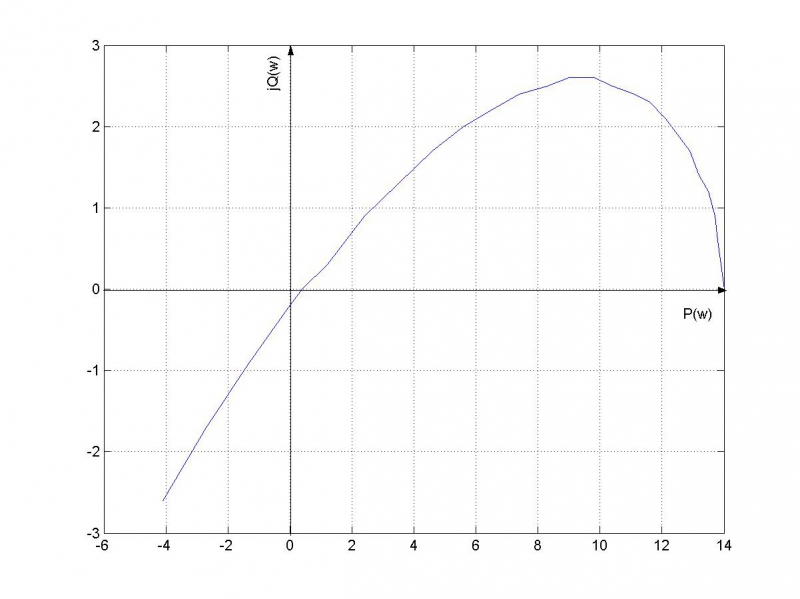
Рис. 2 – Годограф Михайлова нескорректированной системы
Формулировка критерия Михайлова
Система n-ого порядка будет устойчивой, если при изменении частоты ω от 0 до ∞ характеристическая кривая F(jω) пройдет в положительном направлении (против часовой стрелки) последовательно, не обращаясь в 0 π/2∙n квадрантов.
Исходя из формулировки критерия и вида получившейся характеристической кривой, можно сделать вывод, что данная система не устойчива, так как кривая, начинаясь в первом квадранте переходит сразу в четвертый, а затем в третий.
Следствие из критерия Михайлова
Система устойчива, если действительная и мнимая часть характеристической функции F(jω) обращаются в нуль поочередно, т.е. если корни уравнений P(ω)=0 Q(ω)=0 перемежаются.
Исходя из формулировки следствия из критерия Михайлова и корней характеристической функции F(jω) (ωд1=2,1972, ωм1=0 ωм2=2,1651), можно сказать о правильности вывода о неустойчивости системы по виду годографа Михайлова, так как корни характеристической функции F(jω) не перемежаются.
Вывод: Проверка устойчивости системы показала, что при новом значении kу=56,3 система не устойчива и требует коррекции.
Расчет корректирующего устройства


Для построения ЛАЧХ исходной нескорректированной системы произведем вспомогательные вычисления:
ωс1 =1/1.6=0.63 lgωс1 =-0.2
ωс2 =1/1.2=0.83 lgωс2 =-0.08
ωс3 =1/0.35=2.85 lgωс3 =0.46
20lgk = 22
Для построения среднечастотного участка ЛАЧХ желаемой системы по заданным показателям качества (σ = 35%, tп =2с, M=1.6) вычисляем его параметры.
 lgωср=0.82
lgωср=0.82
 lgω2=0.39
lgω2=0.39
 lgω3=1.03
lgω3=1.03
По вычисленным параметрам строим среднечастотный участок ЛАЧХ желаемой системы. Так как СЧ-участок ЛАЧХ не доходит до искомой ЛАЧХ продляем его до сопряжения с ней.
ωc2=ωc2’=0,83c-1
Из ЛАЧХ желаемой системы вычитаем ЛАЧХ исходной системы и получаем ЛАЧХ последовательного корректирующего устройства.
Lку(ω)=Lск(ω)-Lнс(ω)
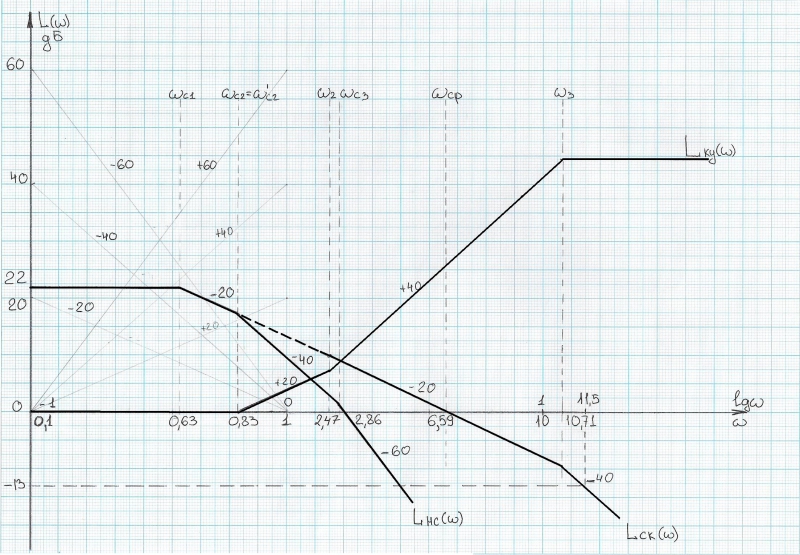
Рис. 3 – Логарифмические амплитудно-частотные характеристики разомкнутого контура нескорректированной системы, скорректированной системы и корректирующего устройства
По виду ЛАЧХ выбираем два последовательно соединенных интегро-дифференцирующих звена с преобладанием дифференцирования. Принципиальная схема корректирующего устройства приведена на рисунке 3.
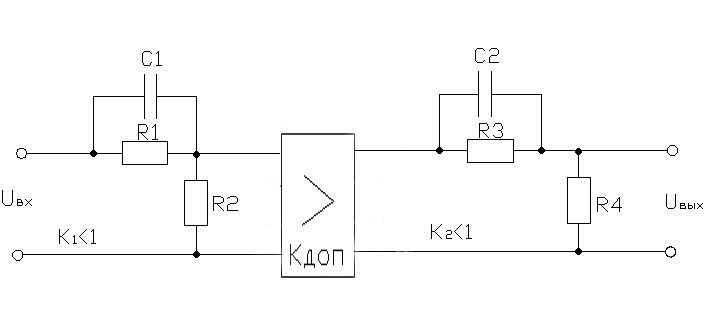
Рис. 4 – Принципиальная схема корректирующего устройства



Пусть R1=1МОм , R3=1МОм , тогда
T3=R1C1



T3=R3C2


Запишем передаточную функцию скорректированной системы:


=
Заменяем р на jω:

Вычислим значение фазы на частоте среза φ(ωср) (значение частоты ωср = 6,59).

φ(ωср)=
Находим запас устойчивости системы по фазе.

Методом подбора найдем ωπ , при которой φ(ωπ) = 180о.

При
ωπ =11,5 φ(ωπ)=180,7о
Чтобы определить запас устойчивости системы по амплитуде необходимо на ЛАЧХ скорректированной системы отметить частоту ωπ =11,5 и определить на этой частоте запас амплитуды.
Как видно из рисунка 3 запас устойчивости по амплитуде ΔL=13дБ.
Вывод: В разделе 2 было доказано, что нескорректированная система при увеличенном коэффициенте kу=56,3 была не устойчива. В данном разделе, введя корректирующее устройство и проанализировав ЛАЧХ уже скорректированной системы можно видеть, что скорректированная система устойчива и имеет запасы устойчивости по амплитуде и фазе:
ΔL=13дБ
Построение области устойчивости скорректированной системы
Исходным выражением для построения области устойчивости является характеристическое уравнение замкнутого контура скорректированной системы. Запишем это характеристическое уравнение:

Подставим в формулу выражение для передаточной функции разомкнутого контура.




Заменяем р на jω.

Объединим действительную и мнимую составляющие выражения:

Приравняем к нулю действительную и мнимую части:
Упорядочим систему уравнений относительно параметров kрк и To :
Решим эту систему уравнений методом Крамера.

Подставим значения коэффициентов в выражения kрк и То .

=

Так как область устойчивости надо строить в плоскости параметров kи и TО, то сделаем переход от коэффициента kрк к коэффициенту kи .
С учетом этого запишем уравнение kрк относительно нужного нам параметра kи .
kи =
Задаваясь значениями частоты ω от 0 до ∞, составляем таблицу 2, получаем данные для построения границы области устойчивости системы в плоскости двух параметров kи и Tо .
Таблица 2. – Расчетные данные для построения границы области устойчивости системы
| ω | kи | To |
| 0 | -0.0269 | 0 |
| 1 | -0.0268 | -0.0163 |
| 2 | -0.0267 | -0.0335 |
| 3 | -0.0272 | -0.0524 |
| 4 | -0.0291 | -0.0744 |
| 5 | -0.0336 | -0.1016 |
| 6 | -0.0426 | -0.1372 |
| 7 | -0.0600 | -0.1880 |
| 8 | -0.0947 | -0.2691 |
| 9 | -0.1718 | -0.4240 |
| 10 | -0.4079 | -0.8526 |
| 11 | -5.0980 | -8.9548 |
| 12 | 0.7966 | 1.1683 |
| 13 | 0.4632 | 0.5709 |
| 14 | 0.3705 | 0.3860 |
| 15 | 0.3332 | 0.2954 |
| 20 | 0.3283 | 0.1446 |
| 25 | 0.3951 | 0.0997 |
| 30 | 0.4850 | 0.0773 |
| 35 | 0.5899 | 0.0635 |
| 40 | 0.7074 | 0.0542 |
| 45 | 0.8363 | 0.0473 |
| 50 | 0.9761 | 0.0421 |
| 55 | 1.1265 | 0/0379 |
Используя данные таблицы 2, построим область устойчивости скорректированной системы в плоскости двух параметров kи и Tо. Область устойчивости приведена на рисунке 5.

Рис. 5. - Область устойчивости скорректированной системы в плоскости двух параметров kи и Tо
Вывод: Как видно из рисунка 5 при коэффициенте kи =0,35 и постоянной времени То=1.6 система находится в области устойчивой работы, что означает правильность расчета корректирующего устройства. Таким образом, при заданных настройках системы автоматического регулирования, удовлетворяющих требованиям точности, система устойчива.
5. Построение графика переходного процесса и оценка качества
скорректированной системы
5.1 Моделирование системы на АВМ
Исходным выражением для моделирования является передаточная функция разомкнутой скорректированной системы Wск(р).

![]()
![]()
![]()
W1(p) W2(p) W3(p)
Составим алгоритмическую схему
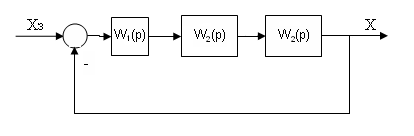
Рис. 6. Алгоритмическая схема
Составим аналоговую модель системы на основании моделей типовых динамических звеньев. Схема модели приведена на рисунке 7.
 :
:
Рис. 7 Схема аналоговой модели системы
Рассчитаем машинные коэффициенты модели.
Машинные коэффициенты для звена W1:
Машинные коэффициенты для звена W2:

Машинные коэффициенты для звена W3:
Моделирование системы на ЦВМ
Исходным выражением для моделирования является передаточная функция замкнутой системы Ф(р)Хз-ε.

Раскроем скобки и приведем передаточную функцию к стандартному виду:

Подставим в формулу численные значения:

 =
=
 =
=
Составим таблицу исходных данных для цифрового моделирования, куда входят округленные коэффициенты bi и ai ,а также параметры моделирования: «шаг интегрирования» - Δt, «шаг печати» - tпеч и «длительность выполнения расчетов» - tк.
tп=1.6; tк=1.2 tп=2; tпеч= tк/20=2/20=0.1; Δt= tпеч/50=0.1/50=0.002.
Таблица 3. – Исходные данные для цифрового моделирования
| b0 | b1 | b2 | b3 | b4 | a0 | a1 | a2 | a3 | a4 | Δt | tпеч | tк |
| 0 | 0.012 | 0.306 | 1.786 | 1 | 0 | 0.012 | 0.306 | 1.786 | 14 | 0.002 | 0.1 | 2 |
Таблица 4. – Результаты цифрового моделирования
| Input data | Calculate result | ||
| Parameter | Value | T | Y |
| B0 B1 B2 B3 B4 A0 A1 A2 A3 A4 dt pt mt | 0.000 0.012 0.306 1.786 1 0 0.012 0.306 1.786 14 0.002 0.1 2 | 0.100 є 0.200 і 0.536 є 0.300 і 0.117 є 0.400 і -0.167 є 0.500 і -0.246 є 0.600 і -0.161 є 0.700 і -0.008 є 0.800 і 0.122 є 0.900 і 0.183 є 1.000 і 0.175 є 1.100 і 0.125 є 1.200 і 0.071 є 1.300 і 0.037 є 1.400 і 0.030 є 1.500 і 0.043 є 1.600 і 0.064 є 1.700 і 0.080 є 1.800 і 0.087 є 1.900 і 0.084 є 2.000 і 0.078 є 2.100 і 0.071 є 2.200 і 0.067 є 2.300 і 0.066 є 2.400 і 0.068 є 2.500 і 0.071 є 2.600 і 0.073 є 2.700 і 0.073 є 2.800 і 0.073 є 2.900 і 0.072 є 3.000 і 0.071 є 3.100 і 0.071 є 3.200 і 0.071 є 3.300 і 0.071 є 3.400 і 0.071 є 3.500 і 0.072 є 3.600 і 0.072 є 3.700 і 0.072 є 3.800 і 0.072 є 3.900 і 0.071 є 4.000 і 0.071 є 4.100 і 0.071 є 4.200 і 0.071 є 4.300 і 0.071 є 4.400 і 0.071 є 4.500 і 0.071 є 4.600 і 0.071 є 4.700 і 0.071 є 4.800 | 0.902 0.536 0.117 -0.167 -0.246 -0.161 -0.008 0.122 0.183 0.175 0.125 0.071 0.037 0.030 0.043 0.064 0.080 0.087 0.084 0.078 0.071 0.067 0.066 0.068 0.071 0.073 0.073 0.073 0.072 0.071 0.071 0.071 0.071 0.071 0.072 0.072 0.072 0.072 0.071 0.071 0.071 0.071 0.071 0.071 0.071 0.071 0.071 0.071 |
На основании данных таблицы 4 построим график переходного процесса и определим основные показатели качества – перерегулирование σ и длительность переходного процесса tп:

Рис. 8 - Переходная характеристика системы по каналу ошибки xз – ε
 ; tп≈2 с.
; tп≈2 с.
ε(∞)=0,07 - что удовлетворяет заданию
6. Вычисление и минимизация квадратичной интегральной оценки
при типовом воздействии
Исходным выражением для вычисления квадратичной интегральной оценки является передаточная функция замкнутой скорректированной системы по каналу хз-ε при единичном ступенчатом воздействии (то есть принимаем задающее воздействие Хз(t)=1, а следовательно Хз(р)=1/р). Запишем эту передаточную функцию:
Раскроем скобки и приведем передаточную функцию к стандартному виду:
Подставим в формулу численные значения:

Запишем выражение для изображения переходной составляющей сигнала ошибки:


Так как передаточный коэффициент разомкнутого контура kрк≥10 допускается упростить выражение для изображения переходной составляющей с учетом следующих условий:
kрк+1=kрк и kрк-1=kрк
Преобразуем выражение для изображения переходной составляющей сигнала ошибки, используя вышеприведенные условия:

=


Для вычисления квадратичной оценки по изображению используют равенство Парсеваля, которое имеет вид:

Где

![]()
![]()
Таким образом коэффициенты di и vi равны:
do =0,0138 vo =0,00019
d1 =0,306 v1 =-0,143
d2 =1,786 v2 =3,19
d3 = kрк
Составим определитель Δ по правилу составления определителя Гурвица


Определитель v составляем из определителя путем замены коэффициентов верхней строки на коэффициенты 0, 1 и 2.


Вычисляем квадратичную интегральную оценку:

Задаваясь численными значениями kрк, составляем таблицу зависимости квадратичной интегральной оценки от коэффициента kрк, которая приведена ниже.
Таблица 5. – Расчетные данные для построения кривой зависимости интегральной оценки от передаточного коэффициента разомкнутого контура
| крк | Qкв |
| 1 | 1.074 |
| 2 | 0.629 |
| 3 | 0.483 |
| 4 | 0.414 |
| 5 | 0.374 |
| 6 | 0.349 |
| 7 | 0.335 |
| 8 | 0.325 |
| 9 | 0.319 |
| 10 | 0.317 |
| 11 | 0.317 |
| 12 | 0.319 |
| 13 | 0.322 |
| 14 | 0.327 |
| 15 | 0.333 |
| 20 | 0.389 |
| 25 | 0.498 |
| 30 | 0.736 |
| 35 | 1.521 |

Рис. 9 - Кривая зависимости интегральной оценки от передаточного коэффициента разомкнутого контура
При помощи программы Matlab вычислим минимум функции Qкв на интервале [1;35], он равен 10,56. Следовательно, оптимальным значением kрк является kрк=10,56. При данном значении коэффициента разомкнутого контура система будет работать в оптимальном режиме, обеспечивая минимальную площадь под графиком переходного процесса.
Теперь перейдем от коэффициента kрк к передаточному коэффициенту kу. Для этого воспользуемся следующей формулой:

При коэффициенте kрк=10,56 и квадратичной интегральной оценке равной Q=0.3166 передаточный коэффициент управляющего устройства kу.= 45,8.
Вывод: В этом разделе с помощью квадратичной интегральной оценки получили оптимальное значение передаточного коэффициента управляющего устройства (kу=45,8). Этот коэффициент получился меньше, чем тот, что был выбран в разделе 2 (kу=56,3). Следовательно, при выборе этого коэффициента точность системы в установившемся режиме увеличится, но могут получиться более колебательные переходные процессы.
Вычисление и минимизация дисперсии сигнала ошибки при случайных воздействияхДисперсия сигнала ошибки D при действии на систему внешних некоррелированных воздействий хз и g может быть представлена суммой:

где Dз – дисперсия, обусловленная неточным воспроизведением задающего воздействия;
Deg – дисперсия, обусловленная неполным подавлением помех.
Вычислим дисперсию, обусловленную неточным воспроизведением задающего воздействия:
где Sхз(ω) – спектральная плотность полезного сигнала

Запишем передаточную функцию замкнутого контура по каналу ошибки хз-ε.


Заменяем р на jω:

Подставим это выражение в формулу дисперсии, обусловленной неточным воспроизведением задающего воздействия:

 =
=
=
 =
=

где
![]()

![]()
Подставим это выражение в формулу дисперсии, обусловленной неточным воспроизведением задающего воздействия:


Вычисление дисперсии неточного задающего воспроизведения вычислим по формуле:

Запишем коэффициенты vi и di для составления определителей Δ и Δv :
v0=0.0024 d0=0.0138
v1=-4.26 d1=0.307
v2=45.624 d2=1.817
v3=12 d3=1.1786+kрк
d4=0,1+0,1kрк
Определитель составляется из коэффициентов di по правилу составления определителя Гурвица.

Определитель Δv составляем путем замены коэффициентов верхней строки матрицы Δ на коэффициенты vi .

где Аij - алгебраические дополнения элементов определителя




Подставим значения алгебраических дополнений в формулы определителей Δ и Δ1 .
![]()

![]()
![]()

 =
=

Далее вычислим дисперсию, обусловленную неполным подавлением помехи:
где Sg() – спектральная плотность помехи
 =120
=120
Запишем передаточную функцию скорректированной системы по каналу «g-»:

Отдельно раскроем скобки и приведем подобные члены знаменателя, после чего подставим численные значения постоянных времени.
Подставим численные значения в формулу передаточной функции скорректированной системы по каналу «g-»:


Далее подставим передаточную функцию системы по каналу «g-» в формулу дисперсии неполного подавления помехи:



где
![]()

![]()

Подставим это выражение в формулу дисперсии неполного подавления помехи:



Вычисление дисперсии неполного подавления помехи вычислим по формуле:
Запишем коэффициенты vi и di для составления определителей Δ и Δv :
v0=0 d0=0,165
v1=0,0084 d1=3,2
d1=3,2
v2=4,2 -2,04
-2,04 d2=0,462 kрк+3,84
d2=0,462 kрк+3,84
v3=120 d3=1.705kрк+3,67
d4=1,1+1,1kрк
Определитель составляется из коэффициентов di по правилу составления определителя Гурвица.

Определитель Δv составляем путем замены коэффициентов верхней строки матрицы Δ на коэффициенты vi .
 где Аij - алгебраические дополнения элементов определителя
где Аij - алгебраические дополнения элементов определителя




Подставим значения алгебраических дополнений в формулы определителей Δ и Δ1 .
![]()
![]()
![]()

 =
=

В соответствии с найденными аналитическими выражениями дисперсии неточного задающего воспроизведения и неполного подавления помехи составим таблицу для построения графиков Dεз =f(kрк) и Dgε =f(kрк), а также суммарного графика Dε =f(kрк).
Таблица 6 - Расчетные данные для построения графиков зависимости дисперсии от передаточного коэффициента разомкнутого контура
| крк | Dε3=f(крк) | Dεg=f(крк) | Dε=f(крк) |
| 0 | 35.294 | 0 | 35.294 |
| 0.5 | 21.492 | 1.979 | 23.471 |
| 1 | 15.640 | 4.999 | 20.639 |
| 1.5 | 12.534 | 7.791 | 20.325 |
| 2 | 10.644 | 10.172 | 20.816 |
| 2.5 | 9.383 | 12.148 | 21.531 |
| 3 | 8.485 | 13.760 | 22.245 |
| 3.5 | 7.812 | 15.054 | 22.866 |
| 4 | 7.287 | 16.073 | 23.361 |
| 4.5 | 6.866 | 16.859 | 23.726 |
| 5 | 6.519 | 17.450 | 23.969 |
| 10 | 4.749 | 18.294 | 23.044 |
| 15 | 3.968 | 17.822 | 21.850 |
| 20 | 3.469 | 18.833 | 22.303 |
| 25 | 3.106 | 21.116 | 24.222 |
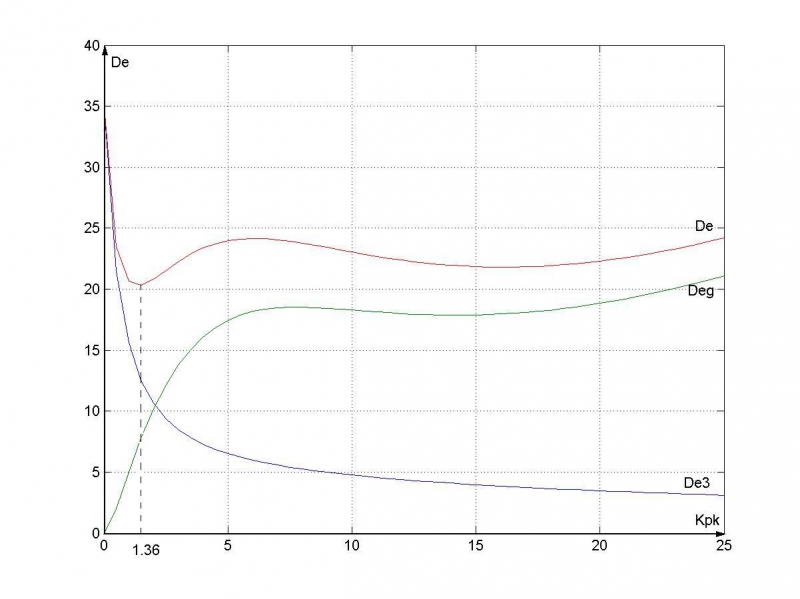
Рис. 10 - Графики зависимости дисперсии сигнала ошибки скорректированной системы от передаточного коэффициента разомкнутого контура
При помощи программы Matlab вычислим минимум функции Dε на интервале [0;25], он равен 1,36. Следовательно, оптимальным значением передаточного коэффициента разомкнутого контура является kрк =1,36 , при котором дисперсия сигнала ошибки минимальна (D=20,29.)
Перейдем от коэффициента kрк к передаточному коэффициенту управляющего устройства kу. Для этого воспользуемся следующей формулой:
Вывод: Для оптимальной работы системы по суммарной дисперсии сигнала ошибки необходимо передаточный коэффициент разомкнутого контура принять равным 1,36 , из чего следует, что передаточный коэффициент управляющего устройства должен быть равен 5,88. Но при таком значении коэффициента управляющего устройства заданная точность управления системы не будет достигнута.
8. Анализ нелинейной системы
В этом разделе объектом исследования является нелинейная система, которая образована из нескорректированной системы заменой преобразующего элемента нелинейным элементом. Анализ системы будем осуществлять при помощи метода фазовых траекторий. В качестве нелинейности используется релейное управляющее устройство с параметрами с=1 и b=1.
Рис. 11 - Алгоритмическая схема нелинейной системы
Параметры автоколебаний определяем методом гармонической линеаризации при помощи амплитудной фазо-частотной характеристики.
Запишем передаточную функцию нелинейного элемента:

Запишем передаточную функцию линейной части системы:

Заменим оператор р на jω и разделим передаточную функцию на действительную и мнимую части:

Для построения годографа Найквиста составим таблицу значений действительной и мнимой частей передаточной функции в зависимости от частоты.
Таблица 7 - Расчетные данные для построения годографа Найквиста линейной части системы
| ω | P(ω) | Q(ω) |
| 0 | 11.82 | 0 |
| 0.05 | 11.61 | -1.84 |
| 0.1 | 8.06 | -3.57 |
| 0.2 | 4.24 | -6.3 |
| 0.4 | -1.07 | -8.14 |
| 0.5 | -2.31 | -7.67 |
| 0.8 | -2.85 | -4.7 |
| 1 | -2.3 | -3 |
| 1.505 | -1.77 | -0.785 |
Годограф Найквиста линейной части системы приведен на рисунке 12.
 =
=

Составим таблицу для построения годографа Найквиста нелинейной части.
Таблица 8 - Расчетные данные для построения годографа Найквиста нелинейной части
| Хm | 1 | 2 | 3 | 4 | 5 | 6 |
| P(Хm) | 0 | -1.36 | -2.2 | -3 | -3.85 | -4.64 |
| Q(Хm) | -0.785 | -0.785 | -0.785 | -0.785 | -0.785 | -0.785 |
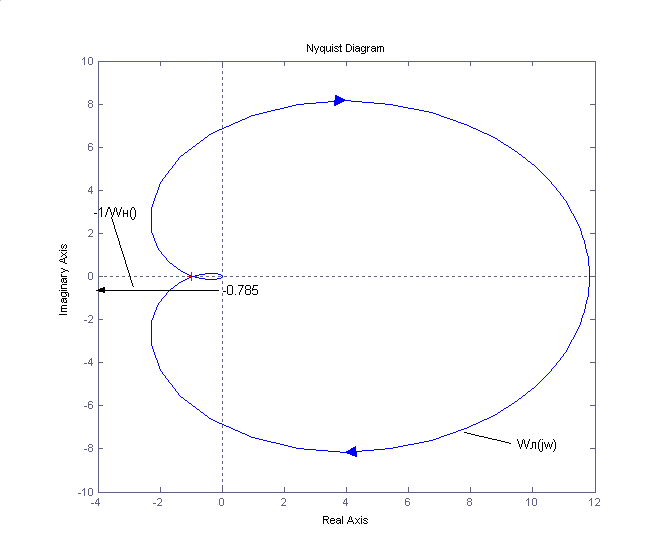
Рис. 12 – Годографы Найквиста линейной и нелинейной системы
Из рисунка 12 находим амплитуду автоколебаний по теореме Пифагора (снимая значения с графика):

Частота автоколебаний равна:
Вывод: Введение в систему нелинейного элемента привело к тому, что появились устойчивые автоколебания с частотой a=1,505с-1 и амплитудой Xma=1,327.
Заключение
В данной работе был проведен комплекс расчетов автоматической системы управления. В результате этого было доказано, что заданный передаточный коэффициент управляющего устройства не обеспечивает заданной точности. Было рассчитано новое значение передаточного коэффициента управляющего устройства, которое удовлетворяет заданной точности управления, но как оказалось при таком значении kу система перешла в неустойчивый режим работы.
Чтобы сохранить точность системы и вернуть ее в устойчивое состояние, было введено корректирующее устройство. Была также построена область D-разбиения в плоскости двух параметров kи и Tо и переходная характеристика системы, которые еще раз доказали, что скорректированная система является устойчивой и обеспечивает необходимую точность управления. Область D-разбиения показала, что параметры kи и Tо могут варьироваться как в сторону увеличения, так и в сторону уменьшения, что дает дополнительные возможности по настройке системы
Также была вычислена интегральная квадратичная оценка, которая показала, что скорректированная система в переходном режиме имеет минимальную площадь под графиком переходного процесса, следовательно, полученный переходный процесс данной системы можно считать наилучшим.
Введение в систему нелинейного элемента привело к тому, что появились устойчивые автоколебания с частотой a=1,505с-1 и амплитудой Xma=1,327.
Таким образом, выполненный расчет системы автоматического регулирования показал, что полученные настройки – оптимальны и удовлетворяют заданным требованиям.
Список литературы.
Лукас В.А. Теория автоматического управления: учебное пособие / В.А. Лукас. -4-е издание, исправленное. – Екатеринбург: Изд-во УГГУ, 2005. – 677 с.
Барановский В.П. Моделирование линейных и нелинейных элементов и систем автоматического управления: учебное пособие / В.П. Барановский. – Екатеринбург: Изд-во УГГГА, 2001. -49 с.
Леонов Р.Е. Вычислительные методы и прикладные программы: конспект лекций / Екатеринбург: Изд-во УГГУ, 2006.
3